[Paper Review]Diffusion Models Beat GANs on Image Synthesis(ADM-G)
개요
GAN대비Diffusion Model(DM)의 이미지 생성 성능을 비교하며,DM이GAN을 능가하는 이유를 분석한Diffusion Models Beat GANs논문을 리뷰할 것이다.
Introduction
- 요즘의
생성 모델은 많이 발전해오고 있다. 하지만 그 중에도 발전 가능성이 아직 많다.
생성 모델이 더욱 발전 한다면, 사용할 수 있는 분야가 셀 수 없이 많다.
GAN은 여러 평가 지표 (FID, Inception Score, Precision, … 등)에 의하여image generation에서SOTA를 달성하고 있다.
- 하지만 이 평가 지표는 다양성을 완전히 포착하지 않고,
likelihood-based model보다 더 다양성을 포착하지 않는다.
- 또한,
GAN은 최적의하이퍼 파라미터와정규화를 하지 않으면 모델이 붕괴하기 때문에 훈련이 어렵다.
- 이러한
GAN의 단점 때문에 다른 domain에 적용하기에도 어렵고, 확장시키기도 어려워졌다. 그 결과likelihood-based model이GAN의sampling image quality와 비슷하게 발전해왔다.
likelihood-based model도 결국 단점이 있었는데, sampling 시GAN보다 매우 느리고sample quality또한 기대에 미치진 못한다.
Likelihood-based model의 한 종류인Diffusion model이 등장하여 확장성도 있고, 높은 품질을 만들어내는 성능을 보였주었다.
CIFAR-10에서SOTA를 달성했지만 다른 어려운 dataset(LSUN,ImageNet)에 대해서는GAN에 밀려있었다.
- 논문 저자들이
Improved Denoising Diffusion Probabilistic Models에서diffusion model의 신뢰성을 증가시키는 연구를 했지만FID가GAN에 비하여 경쟁력 있지는 않았었다.
본 논문에선GAN과Diffusion model이 차이가 나는두 가지 요인에서 비롯된다고 가정한다.
- 최근
GAN연구에서 사용된 모델 아키텍처는 광범위하게 탐색되고 최적화되었다. GAN은다양성(diversity)과정확성(fidelity)사이에서 trade-off의 균형을 조절한다. 따라서GAN은 높은 품질의 샘플을 생성하는 대신 전체 데이터 분포를 완전히 포괄하지는 못한다.GAN은Generator,Discriminator로 나뉘어져 있으므로 둘 간 균형을 조정한다.
본 논문에선 이 두 가지의 요인을Diffusion model에도 적용하고자 한다.
- 먼저 모델의 아키텍쳐를 개선하고, 이후
다양성과정확성간의 trade-off의 균형을 조절 할 수 있는 기법을 개발한다.
- 이 결과 본 논문에서 제안한
diffusion model이 새로운SOTA를 달성하며,GAN을 이기게 되었다.
Background
- 이번 단락에서는
Diffusion model중DDPM에 대한 간단한 배경을 설명하고 있다. Diffusion model에 대한 자세한 설명은 해당 링크에서 보면 될 것 같다.
DDPM에서의 목표는 조금 더 덜 노이즈가 포함된 $x_\text{t-1}$ 를 $x_t$에서 생성하는 과정을 학습하게 된다.
DDPM에서 학습하기 위한 loss로 실제 변분 하한(Variational Lower Bound) $L_\text{vlb}$를 단순화한 $L_\text{simple}$이 성능이 좋음을 관찰하였다.
- 이런 훈련 절차와 샘플링 절차는 denoising score matching model과 동일하다고 한다.
- 다음으로, 조금 더 나은
diffusion model을 설명하게 되는데 기존DDPM에서는reverse process에서의 분산 $\Sigma_\theta(x_t, t)$ 을 고정된 값으로 설정하였는데, 이런고정된 분산이 샘플링 단계 수가 적을 때 성능이 낮아질 수 있다.
- 따라서 $\Sigma_\theta(x_t, t)$ 를 파라미터화 하여 해결하려고 했고, 훈련 loss 또한 $L_\text{vlb}$ 과 $L_\text{simple}$ 를 함께 사용하는
hybrid objective로 해결한다.
본 논문에서도해당 objecive와parameterization을 사용한다.
- 또한
DDIM의Non-Markovian과정으로 인한샘플링 스텝을 줄이는 방법 또한본 논문에서 사용한다.
- 마지막으로 샘플 품질을 평가하는
metrics에 관한 설명으로 이어진다.Metrics중Inception Score(IS)는ImageNet 클래스 분포를 얼마나 잘 학습했는지를 측정하는 메트릭이다.
개별 샘플이 특정 클래스의 예제를 얼마나 그럴듯하게 평가하면서도, 모델이전체 dataset 클래스 분포를 잘 반영했는지 측정한다. 이런IS도 한계점이 있는데, 아래는IS의 한계점을 설명한 것이다.
- 모든 클래스에 대한
전체 분포를 얼마나 잘 커버하는지 평가하지 못한다. - 데이터셋의 일부를 단순히
암기한 모델도 높은 IS 점수를 가질 수 있다.
Fréchet Inception Distance (FID)는IS보다 더 다양성을 잘 평가할 수 있는 방법이다.Inception-V3 모델의latent space에서 두 이미지 분포 간 거리를 측정하여 두 이미지 분포 간의symmetric measure of distance를 측정하게 된다.
sFID라는 변형 버전은 기존FID보다공간적 특성을 고려하여 더 정교한 평가가 가능하다.
- 마지막 평가 방법인
개선된 precision & recall 기반 metrics가 있다.
본 논문은FID를 기본 평가 지표로 사용하고 일관된 평가를 위해동일한 공개 샘플, 코드베이스를 사용하여 평가를 진행한다.
Architecture Improvements
Introduction 11번 글에서 설명했듯이모델의 아키텍쳐를개선한 방법론을 먼저 설명을 할 것이다. 그 후다양성과정확성을 조절한Classifier Guidance를 설명할 것이다.
모델의 아키텍쳐를 개선하기 위하여모델 구조에 대하여ablation study를 진행하였다.DDPM에서는UNet을 사용하였고 해당 구조는 다음과 같은 구성을 가진다. 모든실험은동일한데이터 셋에서 진행했다.
Residual layers와다운샘플링 & 업샘플링 convolutions을 거쳐 피처를 압축 및 복원Skip connections을 사용하여 같은 공간 크기(spatial size)를 갖는 레이어 간 정보를 직접 전달16×16에서단일 헤드를 사용하는글로벌 어텐션(Global Attention) 레이어추가각 Residual block에timestep embedding투영(projection)
본 논문에서는 다음의 구성을 추가하여 모델 구조를 변형하여 실험한다.
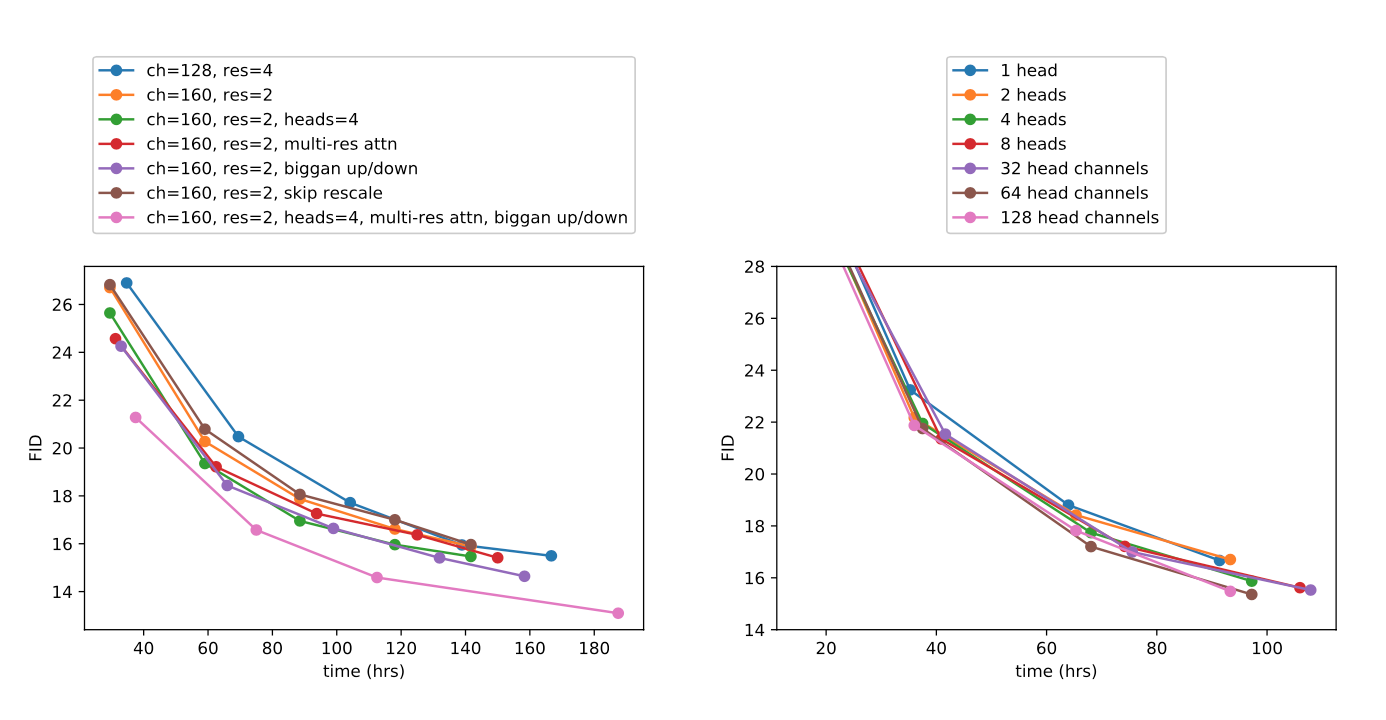
깊이 vs. 너비조정 → 모델 크기를 유지하면서 깊이를 늘릴지, 너비를 늘릴지 실험- 깊이를 증가시키면 성능이 향상되지만, 학습 시간이 길어지는 단점이 발생
- 이후 실험에서 깊이를 증가시키는 실험을 사용하지 않기로 결정함
attention head 수 증가→ 더 많은attention head가 성능 향상에 기여하는지 실험-
고정된 attention head 수vs고정된 채널 수를 비교 실험을 하였다.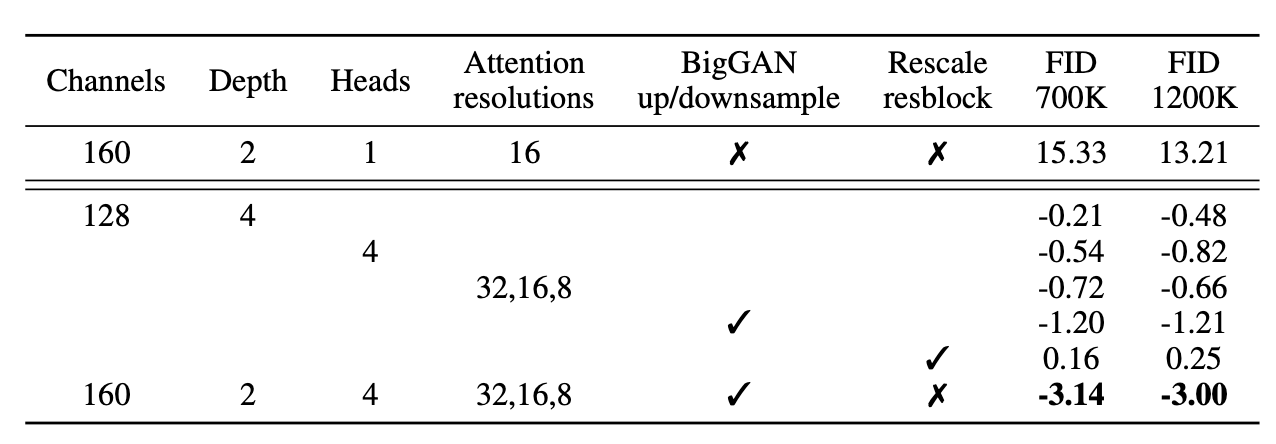
- attention를 늘리거나 head당 채널 수를 줄이는 것이
FID 향상
- attention를 늘리거나 head당 채널 수를 줄이는 것이
-
attention 범위 확장→ 기존 16×16에서만 적용하던attention을32×32,16×16,8×8에도 적용BigGAN residual block 활용→ 업샘플링 및 다운샘플링 과정에서BigGAN의residual block사용Residual connection rescaling→ 안정성을 위해 residual connection을 $\frac{1}{\sqrt{2}}$ 로 rescale
- 결론적으로
residual connection을rescale하는 것을 제외하고 이러한 실험 사항들이 서로 결합될 때더 큰 성능 향상을 보였다.
Adaptive Group Normalization(AdaGN)
AdaGN은Group Normalization후에timestep및class embedding을residual block에 적용하는 방식이다.
$$\text{AdaGN}(h,y) =y_s\text{GroupNorm}(h) + y_b$$
- $h$: 첫 번째
convolution이후의residual block의중간 활성값(intermediate activations) - $y = [y_s, y_b]$:
timestep 및 class embedding을선형 변환하여 생성된 벡터
- 이로 인하여
각 residual block에timestep과클래스 정보를 반영할 수 있음
- 초기에
AdaGN을 적용한diffusion model에서 성능 향상을 하여, 기본 값으로 사용을 한다.
- 그래서
모든 비교 실험을 거쳐최종 모델 아키텍쳐는 다음과 같다.
- 각 해상도당
residual block2개 - 64채널 per head의
다중 어텐션 구조 - 해상도
32×32,16×16,8×8에서 어텐션 적용 BigGAN residual blocks을 업/다운샘플링에 사용AdaGN적용
Classifier Guidance
conditional gan은 잘 설계된 아키텍쳐와 함께class labels을 활용한다. 이처럼Class 정보가 생성 모델의 중요한 역할을 한다.
GAN에서는discriminator를 통하여class 정보를 반영한다.
- 따라서
conditional diffusion도 연구해볼만한 가치가 있다.
- 이미
AdaGN에서class 정보를 포함하는 방법을 사용했는데, 이 방법 말고본 논문은classifier($p(y|x)$)를 활용하여diffusion의 성능을 향상시키는 것을 보여준다.
이전 연구에서는pretrained diffusion model이classifier의 gradient를 활용하여 조건부 생성이 가능함을 보였다.
- 따라서
본 논문은noisy한 $x_t$를 기반으로 분류기 $p_\phi(y|x_t,t)$를 학습시키고, 그 gradient를 활용 ($\nabla_{x_t}logp_\phi(y|x_t,t)$)하여diffusion sampling process를특정 클래스$y$로 유도되도록 할 것이다.
- 앞으로
분류기 조건부 샘플링 방법에 대해두 가지를 검토 한 후 샘플 품질 개선에 대해서 사용하는 방법을 설명 할 것이다.
Conditional Reverse Noising Process
$$p_{\theta, \phi}(x_t \mid x_{t+1}, y) = Z p_{\theta}(x_t \mid x_{t+1}) p_{\phi}(y \mid x_t)$$
- $Z$는 정규화 상수
위 식 유도
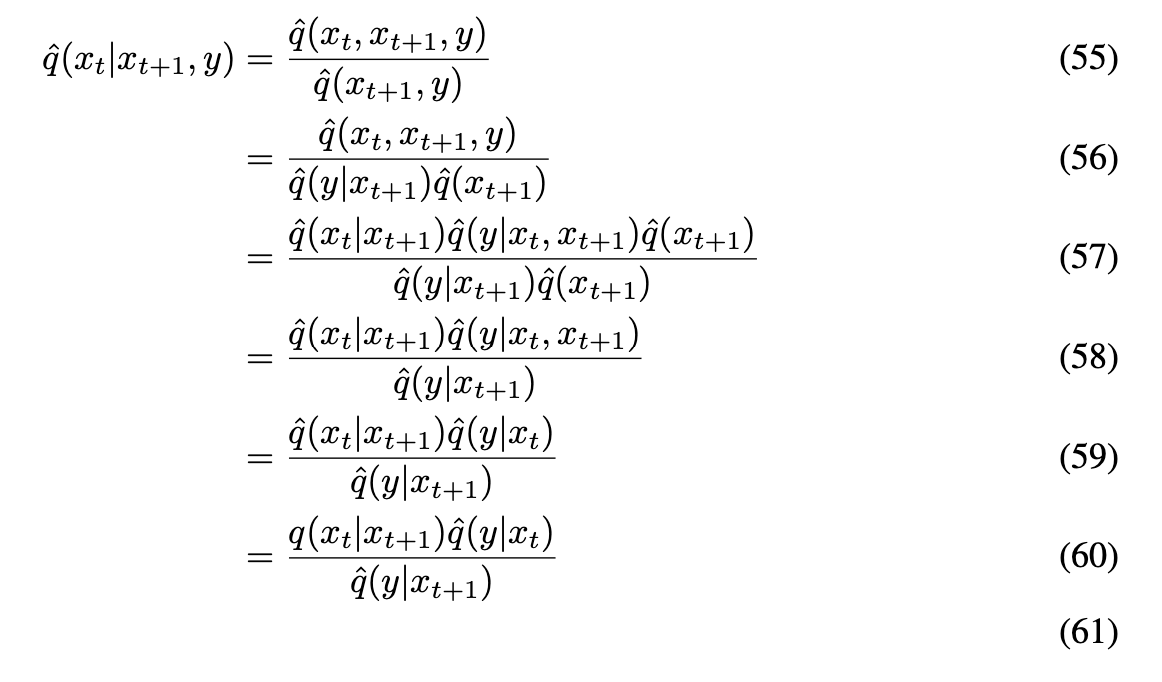
(59)에서 $\hat{q}$가 $q$가 된 이유는(53)때문이다.(60)에서 $\hat{q}(y \mid x_{t+1})$가 $x_t$에 영향을 받지 않으므로, 상수 ($Z$)취급이 가능하다.- 해당 전개는
본 논문 Appendix H에 있는 내용을 가져온 것이다.
- 기존
Unconditional ddpm의reverse process의 식은 $p_\theta(x_t|x_\text{t+1})$을 사용한다. 이를class label$y$에 대해condition하게 변경한다면위 식으로 변경이 가능하다.
$$ \begin{aligned} \log p_{\phi}(y \mid x_t) &\approx \log p_{\phi}(y \mid x_t) \Big|_ {x_t = \mu} + (x_t - \mu) \nabla_{x_t} \log p_{\phi}(y \mid x_t) \Big|_{x_t = \mu} \\ &= (x_t - \mu) g + C_1 \\ g &= \nabla _ {x_t} \log p _ {\phi}(y \mid x_t) \end{aligned} $$
- 따라서 $p_{\phi}$를 계산하면
sampling 식을 다시 유도 할 수 있을 것이다. 위는 $p_{\phi}$을테일러 정리를 활용하여 전개한 것이다.
$$ \begin{aligned} \log \big( p_{\theta}(x_t \mid x_{t+1}) p_{\phi}(y \mid x_t) \big) &\approx -\frac{1}{2} (x_t - \mu)^T \Sigma^{-1} (x_t - \mu) + (x_t - \mu) g + C_2\\ &= -\frac{1}{2} (x_t - \mu - \Sigma g)^T \Sigma^{-1} (x_t - \mu - \Sigma g) + \frac{1}{2} g^T \Sigma g + C_2 \\ &= -\frac{1}{2} (x_t - \mu - \Sigma g)^T \Sigma^{-1} (x_t - \mu - \Sigma g) + C_3 \\ &= \log p(z) + C_4, \quad z \sim \mathcal{N}(\mu + \Sigma g, \Sigma) \end{aligned} $$
- $p_{\phi}$과 기존
ddpm에서 나온 $p_{\theta}(x_t \mid x_{t+1})$의 식을 활용하여위 식을 전개할 수 있다.
맨 마지막 식을 확인을 하면 $log p(z)$의 $z$는 $\mathcal{N}(\mu + \Sigma g, \Sigma)$에서sampling이 된 것을 확인 할 수 있다.
- 이는
unconditional에서 평균($\mu$)을 $\Sigma g$만큼 shift한 것이다. 따라서 $g$는 classifier의 gradient의 값이므로 이 gradient를 활용하여 conditional을 만족하게 된다.
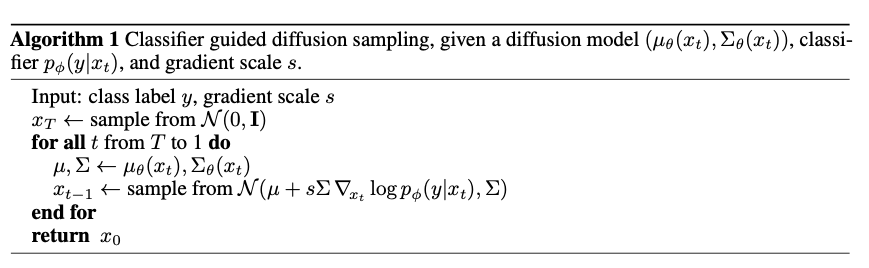
- 정규분포에서 $x_t$추출
- T부터 1까지
sampling시작 - t시점에서 $x_t$의 평균과 분산 계산
- 기존
ddpm gaussian distribution의 평균에scaling factor * classifier gradient의 값을 shift한 분포에서 sampling - t가 1이 될 때까지 반복
- 위 알고리즘은
Classifier guided를stochastic diffusion에sampling을 과정이다. 여기의scaling factor($s$)는gradient scale이라는 하이퍼 파라미터이다.
Conditional Sampling for DDIM
- 위의
conditional sampling은 stochastic한 상황만 가능하다. 따라서DDIM을 이용한deterministic sampling method는 적용될 수 없게 된다.
- 따라서
score-based conditioning trick에 의하여 식 전개를 하게 된다. 따라서score function이 아래가 된다.
$$\nabla_{x_t} \log q(x_t) = - \frac{\epsilon_{\theta}(x_t)}{\sqrt{1 - \bar{\alpha}_t}}$$
- 이 식을 활용하여 $log q(x_t,y)$를 정의할 수 있게 된다.
$$ \begin{aligned} \nabla_{x_t} \log q(x_t, y) &= \nabla_{x_t} \log q(x_t) + \nabla_{x_t} \log q(y \mid x_t) \\ &\approx -\frac{1}{\sqrt{1 - \bar{\alpha_t}}} \epsilon_{\theta}(x_t, t) + \nabla_{x_t} \log p_{\phi}(y \mid x_t) \\ -\frac{1}{\sqrt{1 - \bar{\alpha_t}}} \hat{\epsilon}(x_t) &= -\frac{1}{\sqrt{1 - \bar{\alpha_t}}} \left( \epsilon_{\theta}(x_t, t) - \sqrt{1 - \bar{\alpha_t}} \nabla_{x_t} \log p_{\phi}(y \mid x_t) \right) \\ \\ \hat{\epsilon} _ {\theta}(x_t, t) &= \epsilon_{\theta}(x_t, t) - \sqrt{1 - \bar{\alpha_t}} \nabla_{x_t} \log p_{\phi}(y \mid x_t) \end{aligned} $$
- 따라서 새로운
classifier-guided predictor$\hat{\epsilon_\theta}$가 도출되게 된다.
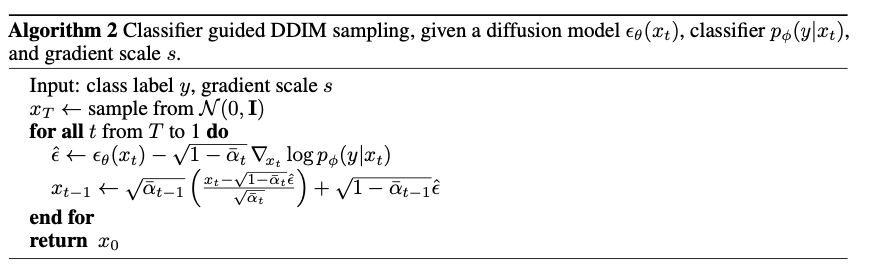
정규분포에서 $x_t$ 추출- T부터 1까지
sampling시작 - t시점에서 $\epsilon_\theta$에
classifier gradient를 반영하여 $\hat{\epsilon}$을 구함 그 값을 활용하여 기존 DDIM에서 $x_\text{t-1}$을 구하는 식으로 계산- t가 1이 될 때까지 반복
- 위 그림은
ddim 샘플링일 때의 샘플링 알고리즘을 나타낸다.Conditional Reverse Noising Process와 다른점은classifier gradient를 통해 $\epsilon$ 모델 자체를 업데이트에 활용 한다는 점이다.
Scaling Classifier Gradients
Large scale generative task에classifier를 적용시키기 위해 ImageNet을 가지고 모델 구조를UNet의downsampling부분을 통해 학습 시켰다.
8*8 layer에attention pool을 적용시켜 최종 결과를 나오게 했다.Diffusion model에서 사용한 noise와 동일한 분포로 학습시켰다.
44번 줄의샘플링 알고리즘을 보면gradient scale의 하이퍼 파라미터가 나온다. 이것이 있는 이유는scale = 1로 설정을 한 경우 샘플링의 결과가 class에 할당된 확률이 50% 근처이고,1보다 큰 scale factor를 사용한 경우엔 특정 class에 속할 확률이 100% 부근의 값으로 수렴하게 된다.
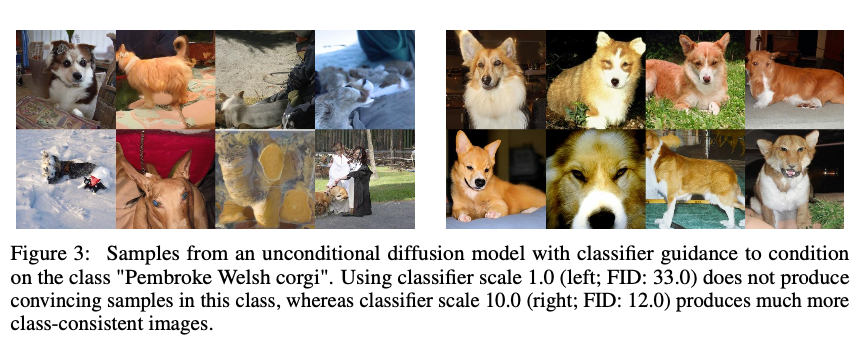
위 사진을 보면 왼쪽의scale factor = 1이고 오른쪽은10을 사용하고,"Pembroke Welsh corgi"라는 class를 부여했을 때의 샘플링 결과이다. 결과를 보면 확실히 오른쪽의 샘플링 결과가 더욱 좋은 것을 확인할 수 있다.
- 수치적으로도
FID가 많이 개선이 되었다.
scale factor가 1보다 커지면 좋은 수식적인 이유
$$s \cdot \nabla_x \log p(y \mid x) = \nabla_x \log \left( \frac{1}{C} p(y \mid x)^s \right)$$
- 임의의 상수 $C$에 의하여 위 수식이 성립하게 된다.
- 따라서
s>1의 경우에 분포 $p(y|x)$는 더 sharp해지고, 이에 대한class gradient scale을 증가한다. - s가 커질수록
특정 class에 대해 높아지고,나머지 class에 대해서는 낮아진다.- 이는 곧, sample의
diversity는 낮아지고,fidelity(품질)이 높아지게 된다.
- 이는 곧, sample의
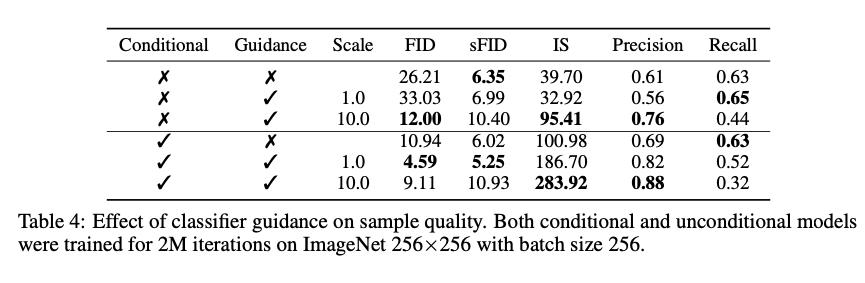
- 지금까지
diffusion model이unconditional이라는 가정을 가지고 왔다. 본 논문에선conditional diffusion model과unconditional + classifier guidance의FID차이가 많이 나지 않다고 한다.
conditional model은 직접 이미지에 대한class를 넣어주는 방식을 의미한다.
- 위 사진을 보면 물론,
conditional model을guided하면FID가 더욱 향상이 되는 것을 확인 할 수 있다.
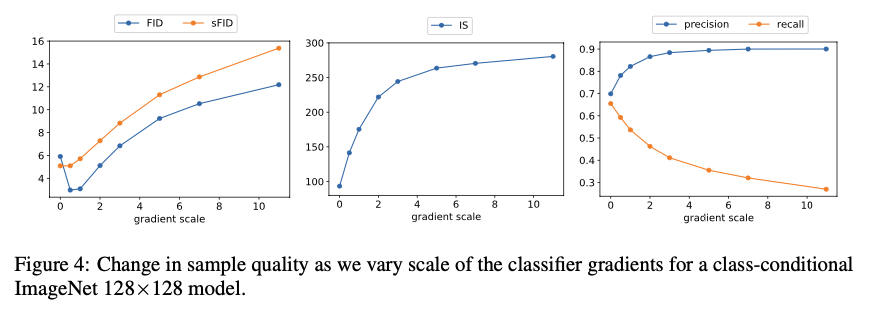
- 또한
위 그래프는scale factor에 따른평가 지표들을 비교한 그래프이다.
- scale 값이 커질수록
quality (IS,precision)은 증가하지만,diversity(recall)은 감소하는 것을 확인할 수 있다.
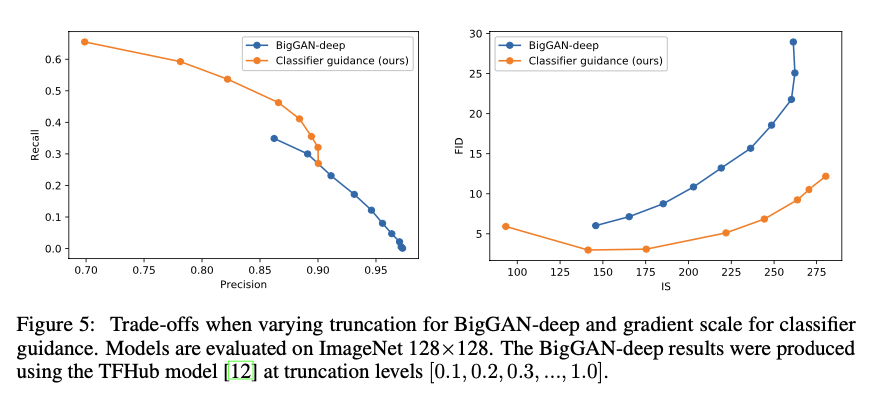
- 그 아래 그래프는
classifier guidance로 인해BigGAN-deep의 성능을 뛰어 넘은 것을 확인 할 수 있다.
Results
- 본 논문이 제안하는 모델은
Ablated Diffusion Model(ADM)이고classifier guidance를 사용하면(ADM-G)이다.
- 다양한 데이터셋 및 해상도에서
GAN을 뛰어넘는우수한 성능을 보여준다.
- 위 결과는
BigGAN-deep 모델과제일 좋은 성능의 ADM의sampling 이미지들이다. 대게 이미지의quality는 비슷하지만ADM이 더 다양한 이미지를 만들어내는 것을 확인할 수 있다.
Limitations and Future Work
- 여전히
denoising step을 사용하기 때문에 샘플링에서GAN보다 느리다.
Single step model의 샘플은 이전likelihood-based model보다는 좋고,GAN과 경쟁력은 아직 없다.
- 또한 이때는
classifier guidance는 레이블이 있어야 사용이 가능한 한계를 가지고 있다.
Unlabeled data로 확장이 가능하다.