[Paper Review]Generative Adversarial Nets(GAN)
Contents
개요
VAE논문 다음으로Generative분야에서 기초가 되는 논문인GAN에 관한 리뷰를 할 것이다.
Introduction
- 다양한
data환경에서확률 분포를 잘 표현할 수 있는 풍부하고계층적인 모델을 발견하는 것이딥러닝의 잠재력이다.
딥러닝의 두드러진 성공 사례는 풍부한감각 input을class label로 매핑하는 판별 모델이다.
- 이런 성공은
backpropagation과dropout의 algorithm, gradient를 가진조각별 선형적 유닛들(ReLU)에 기반을 두고 있다.
- 그동안
Deep generative model은 큰 영향을 끼치진 못했다.Likelihood에 대한 추정과 관련된 전략에서 발생하는 계산을 근사화하는 것이 어렵고,조각별 선형적 유닛들을 활용하여generative에서 활용하는 것도 어렵기 때문이다.
- 따라서 본 논문은 이런 어려움들을 피할 수 있는
추정 절차를 제안한다.
- 제안된
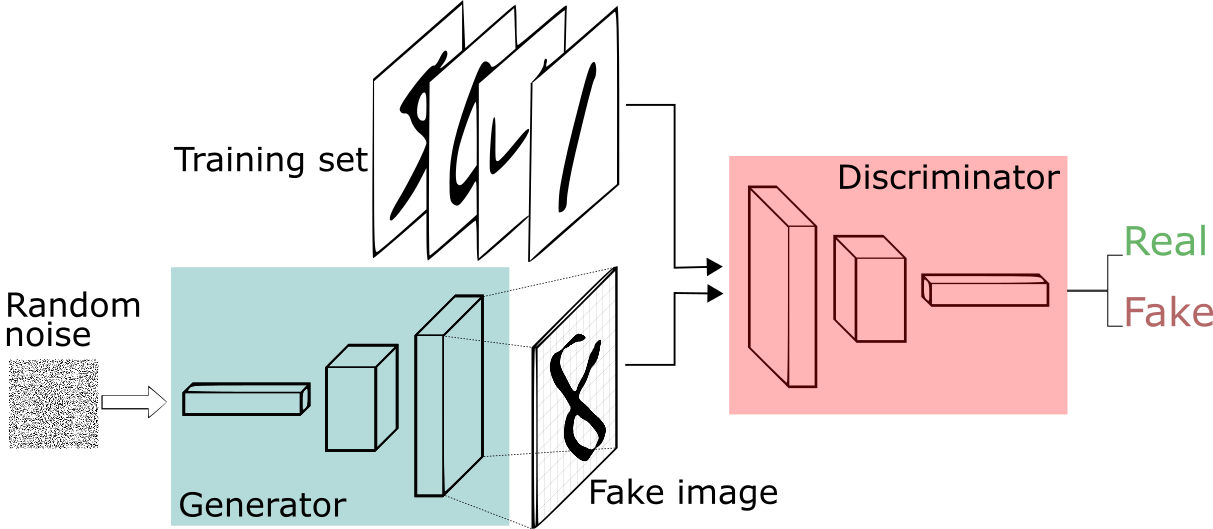
adversarial nets은generative model은discriminative model과 맞서게 된다.
Discriminative model은model 분포에서 나온 것인지data 분포에서 나온 것인지 구분하는 방법을 학습한다.
Generative model은 위조자와 비슷하게 생각할 수 있다. 이는 fake 지폐를 만들어 경찰의 탐지 없이 사용하려고 한다. 반면discriminative model은 경찰에 비유할 수 있다. 이런 fake 지폐를 탐지하려고 한다.
- 이런 상황 속에서 두개의 model이 자신들의 방법을 개선하려고 한다. 결국 위조지폐가 진짜 지폐와 구별되지 않게 되게 된다.
- 이 framework는 다양한 모델과 최적화 방법에 대해서
특정한 training algorithm을 도출할 수 있다.
Generative 모델이 MLP을 통해random noise를 통과시켜 sample을 생성하는 특수한 경우를 탐구합니다. 이런 특수한 경우를적대적 신경망(Adversarial Nets)이라고 부른다.
Generative, discriminative model둘 다backpropagation을 통하여 업데이트를 하며generative model을 통하여 sampling을 할 땐forward만 수행한다.
Adversarial nets
- 이젠
Adversarial nets에 대한 설명을 할 것 이다.Adversarial modeling framework는both multilayer perceptron일 때 곧바로 적용할 수 있다.
- Data x에 $p_g$ 분포를 배우기 위하여 사전에
noise 변수$p_z(z)$를 선언한다. 그 후 $G(z;\theta_g)$의 data space에 매핑을 하게 된다.
- 이 때 $G$는 파라미터 $\theta_g$를 지닌 미분 가능한 함수이다.
- 또한
두번째 multilayer perceptron이고 output이하나의 scalar가 나오는 $D(x;\theta_d)$가 있게 된다. 이때 $D(x)$는 $p_g$분포와는 다른 $x$로부터 나왔을 확률을representation한다.
- 이때 나온 output(single scalar)이
1: real ~ 0: fake일 확률을 나타낸다.
- 본 논문에서 나오는
훈련은 $D$는훈련 샘플과 $G$에서 나온 샘플 (fake image)모두에 대해올바른 label(real or fake)을 할당하는 확률을 최대화하도록 훈련이 된다.
- 또 동시에 $G$를 $log(1-D(G(z))$ 를 사용하여 최소화 하는 방식으로 훈련을 하게 된다.
- 위의 내용을 총 정리한 $V(G,D)$ 의
목적 함수(Object Function)를 나타내면 아래의 식이다.
$$\min_G \max_D V(D, G) = E_{x \sim p_{\text{data}}(x)} [\log D(x)] + E_{z \sim p_z(z)} [\log(1 - D(G(z)))]$$
- 위의
Adversarial net을 나타내는 목적 함수를 좀 더 살펴 보도록 할 것 이다.
- $\min_G \max_D V(D, G)$ 의 부분을 먼저 살펴보자면 $V(D, G)$ 식에서 $G$ 는 낮추고자 하고 $D$ 는 높이고자 하는 것을 알 수 있다.
- $D$의 목표는 진짜 데이터에 대해 높은 확률을 부여하고 가짜 데이터에 대해 낮은 값을 부여하도록 하는 역할이기 때문에 최대화를 목표로 한다.
- $G$의 목표는 생성된 데이터가 $D$에게 진짜 데이터 처럼 보이게 하는 역할이기 때문에 최소화를 목표로 한다.
- $E_{x \sim p_{\text{data}}(x)} [\log D(x)]$ 은 원본 데이터 $p_\text{data}(x)$에서 한개의 데이터인 $x$를 sampling을 하여 그 $x$를 $D$에 넣은 값에 $log$를 취한 값의 기대값을 나타낸다.
- 따라서
- 앞서 13번을 보면 사전에
noise 변수인 $p_z(z)$ 를 선언한다고 나와 있다.
- 따라서 $E_{z \sim p_z(z)} [\log(1 - D(G(z)))]$ 의 식은 하나의
noise 분포$p_z(z)$ 에서 한 값을 sampling하여 그 $x$ 를 생성자 $G$ 에 넣고가짜 이미지를 만든 다음에 $D$에 넣고 $1-D$의 형태로 만든 값에 $log$를 취한 값의 기대값을 나타낸다.
- 그래서 이런 두 항을 $D$의 관점에서 봤을 때
maximize하기 때문에원본 데이터(x)에 대해서는real(1)을 찾을 수 있도록 하고 반면에가짜 이미지(z)가 들어왔을 때는 그 이미지가fake(0)인지 분류할 수 있게 가능하게 한다.
- 생성자 $G$는 이 $E_{z \sim p_z(z)} [\log(1 - D(G(z)))]$ 항을
minimize하기 때문에 다음과 같이 해석을 할 수 있게 된다.
noise 분포에서 뽑은 가짜 이미지가 판별자에 의해서 진짜(1)라고 내뱉을 수 있도록 학습을 하는 것이다.
- $G$가 그럴싸한 이미지를 만들 수 있도록 학습을 하는 것이다.
Theoretical analysis of adversarial nets
- 다음은
Adversarial net의 이론적 분석을 제시한다.Non-parametric limit인 상황에서 이Net의훈련 기준은 $G$와 $D$가 충분하게 있을 때 data를generating하는 기능을 하게 된다.
- 이때 나온
Non-parametric상황은 특정한 매개변수 수에 제한되지 않는다는 것을 의미하게 된다.- 즉, 임의의 복잡한 함수도 근사할 수 있는 충분한 유연성을 가진 경우를 의미한다.
- $D$를 최적화 하는 단계를 k번 반복하고, $G$를 최적화하는 단게를 한 번 수행하게 된다.
- $G$가 충분히 천천히 변하는 동안 $D$가 optimal한 solution을 지니도록 한다.
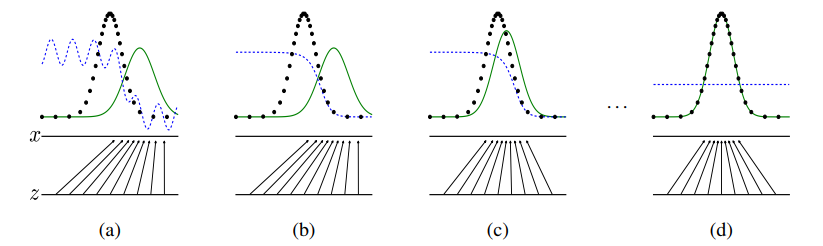
- 위 그림은 해당 학습 과정에 데이터 분포를 그림으로 표현한 것이다.
파란색 점선: discriminative distribution(데이터 구분),검은색 점선: data generating distribution $p_x$(실제 데이터),녹색 실선: generative distribution $p_g$(생성한 데이터)이다.
- 또한 밑에 수평선 $z$는 $z$가
샘플되는 영역(domain)을 나타낸다. - 이때
z->x로 향하는 화살표들은mapping x = G(z)가non-uniform한 분포p_g를transformed samples로 변경하게 된다.
각 단계에 대한 설명을 할 것이다.a: 학습 초기 단계이다. 그림을 보면discriminative distribution이 부분적으로 정확한 classifier인 상태이다.
b: $D$가 $D*(x) = p_data(x)/((p_data(x) + p_g(x))$로 수렴하여실제 데이터와생성된 가짜 데이터를 구분할 수 있게 학습이 된 상태이다.
c: $G$를 학습시킵니다. 이때 $D$의그래디언트는 $G(z)$가실제 데이터와같은 데이터로 변형되게 변하는 상태를 볼 수 있다.
d: $G$와 $D$가 충분한 능력을 가질 때까지a~c를 여러번 반복합니다. $G$는 $p_g = p_data$라고 할 정도로 데이터를 잘 생성하는 것을 확인할 수 있다. 또한 $D$는 두 데이터의 차이를 구분할 수 없게 되었다. 즉, D(x) = 0.5입니다.
0.5인 이유는 훈련이 잘 되었을 때 $D$가 실제인지 가짜인지 50%의 확률로 추정하기 때문이다.
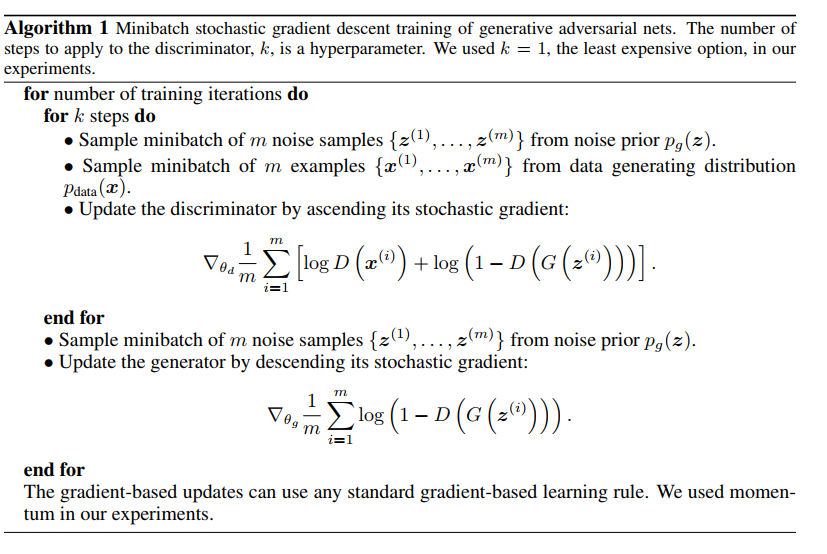
위 그림은위의 단계들을pseudo code로 각 step을 나타낸 그림이다.
- 결론적으로
adversarial net의 목적 함수들의최종 목표를 정리하자면 $p_g -> p_\text{data}$ 이다. 생성자의 분포가 원본 학습데이터의 분포를 잘 따를 수 있도록 만드는 것이다.
- 또한 $D(G(z)) -> 1/2$이다. $D$가 더이상 가짜 데이터와 진짜 데이터를 구분할 수 없기 때문에 $1/2$로 가게 되는 것이다.
Global Optimality
- 다음은 실제로 학습을 진행했을 때 $p_g -> p_\text{data}$ 로 진행하는지에 대해서 증명을 할 것이다.
- 매 상황에서 $D$와 $G$가 어디서
global optimal을 가지는지에 대해서 나타낼 것이다.
- $G$가 고정되어 있을 때 $D$의
optimal point는아래 식과 같다.
$$D_G^*(x) = \frac{p_\text{data}(x)}{p_\text{data}(x) + p_g(x)}$$
- 이제
위 식이 어떻게 나왔는지에 대해서 증명을 할 것이다.
- $V(G,D)$를 변경을 하면
아래 식과 같아진다. $$V(G, D) = E_{x \sim p_{\text{data}}(x)} [\log D(x)] + E_{z \sim p_z(z)} [\log(1 - D(G(z)))]$$ $$= \int_x p_{\text{data}}(x) \log(D(x))dx + \int_z p_z(z) \log(1 - D(G(z)))dz \ (\therefore E[X] = \int_{-\infty}^{\infty} x f(x)dx )$$
- 그리고 식을 조금 더 정리를 하게 되면
아래 식과 같아진다. $$= \int_x p_{\text{data}}(x) \log(D(x)) \dx + \int_x p_g(x) \log(1 - D(x))dx$$
- 이때 $alog(y) + blog(1-y)$ 의 형태일 때 $\frac{a}{a+b}$ 에서
global optima를 가진다는 정리를 이용하게 되면 $D_G^*(x)$의 식이 나오게 되는 것이다.
- 이제 $G$의
global optima point를 구하려고 한다.
- 아래는 고정된 $G$에 대해서 $V$함수를 최대로 만드는 $D$에 대한 함수 이다. 이는
Global optima를 가지는 $D$함수에 대한 $V$함수로 정의가 가능하다. $$C(G) = max_D V(G, D) = E_{x \sim p_{\text{data}}(x)} [\log (D^*(x))]+ E_{z \sim p_z(z)} [\log(1 - D^*(G(z)))]$$- $D^*$로 $D$는 이미
optima하게 되어있는 것을 확인 할 수 있다.
- $D^*$로 $D$는 이미
- 위 식의 $D$를 풀어서 작성하면 아래 식과 같다. $$= E_{x \sim p_{\text{data}}(x)} \left[ \log \frac{p_{\text{data}}(x)}{p_{\text{data}}(x) + p_g(x)} \right] + E_{x \sim p_g(x)} \left[ \log \frac{p_g(x)}{p_{\text{data}}(x) + p_g(x)} \right](\therefore D_G^*(x) = \frac{p_\text{data}(x)}{p_\text{data}(x) + p_g(x)})$$
- 식 변형을 위하여 식에 2를 곱하고 $log(4)$를 빼준다. $$= E_{x \sim p_{\text{data}}(x)} \left[ \log \frac{2 \cdot p_{\text{data}}(x)}{p_{\text{data}}(x) + p_g(x)} \right] + E_{x \sim p_g(x)} \left[ \log \frac{2 \cdot p_g(x)}{p_{\text{data}}(x) + p_g(x)} \right]-log(4)$$
- 이 식은 다시
KL-divergence로 변형할 수 있다. $$= KL\left(p_{\text{data}} \bigg| \frac{p_{\text{data}}(x) + p_g(x)}{2} \right) + KL\left(p_g \bigg| \frac{p_{\text{data}}(x) + p_g(x)}{2} \right) - \log(4) (\therefore KL(p_{\text{data}} | p_g) = \int_{-\infty}^{\infty} p_{\text{data}}(x) \log \left( \frac{p_{\text{data}}(x)}{p_g(x)} \right) dx)$$
- 이는 다시 $JSD$로 변환이 가능했다.
KL-divergence는 두개의 분포가 수치적으로 얼마나 차이가 나는지에 대해서 일반적으로 사용할 수 있는 공식이다.Jsd는KL-divergence는 distance matrix로 활용하기 어렵기 때문에JSD방법론을 사용하게 된다.- 두개의 분포가 있을 때
두 분포의 distance를 구하는데 사용이 된다.
- 두개의 분포가 있을 때
$$= 2 \cdot JSD(p_{\text{data}} | p_g) - \log(4)(\therefore JSD(p | q) = \frac{1}{2} KL\left(p \bigg| \frac{p + q}{2}\right) + \frac{1}{2} KL\left(q \bigg| \frac{p + q}{2}\right))$$
위 식은 이 JSD 분포는 최솟값으로 0의 값을 가지게 된다. 따라서 최종적으로 최솟값으로 $-log(4)$로 얻는다.
- 그래서 이러한 최솟값을 얻을 수 있게 하는 것은 $p_data$와 $p_g$가 동일할 때를 의미한다.
- 따라서
30번 라인을 보면 $D$가 수렴을 한 후에 $G$를 학습시켜 $G$도 수렴하게 가중치 업데이트를 수행하게 되는 것을 알 수 있다.
Experiment
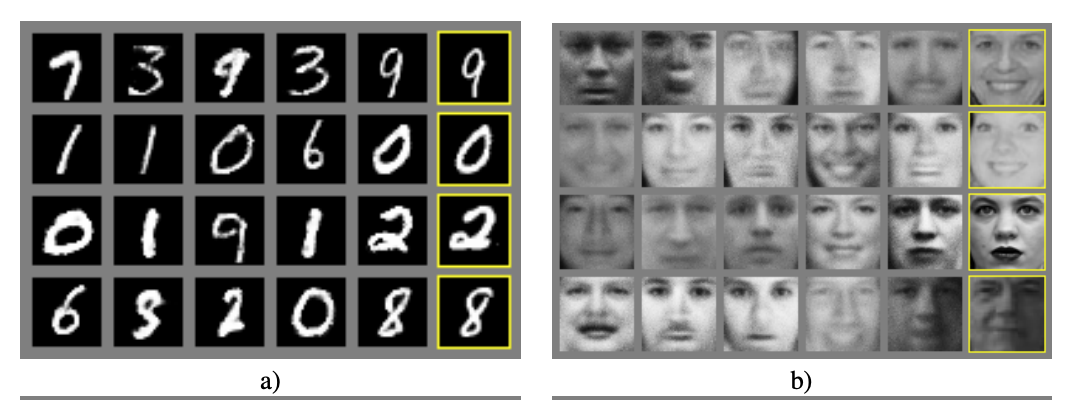
위의 훈련 결과를 보면 노란색 박스가 훈련 중 가장 가까운 sample을 뽑은 것이다. 이를 보면 왼쪽과 확연히 다른 것을 확인 할 수 있는데 이는 모델이 훈련 시memorized하지 않았다는 것을 의미한다.