[Paper Review]Denoising Diffusion Probabilistic Models(DDPM)
개요
Diffusion의 기초인DDPM에 대한 논문을 리뷰할 것이다.
Introduction
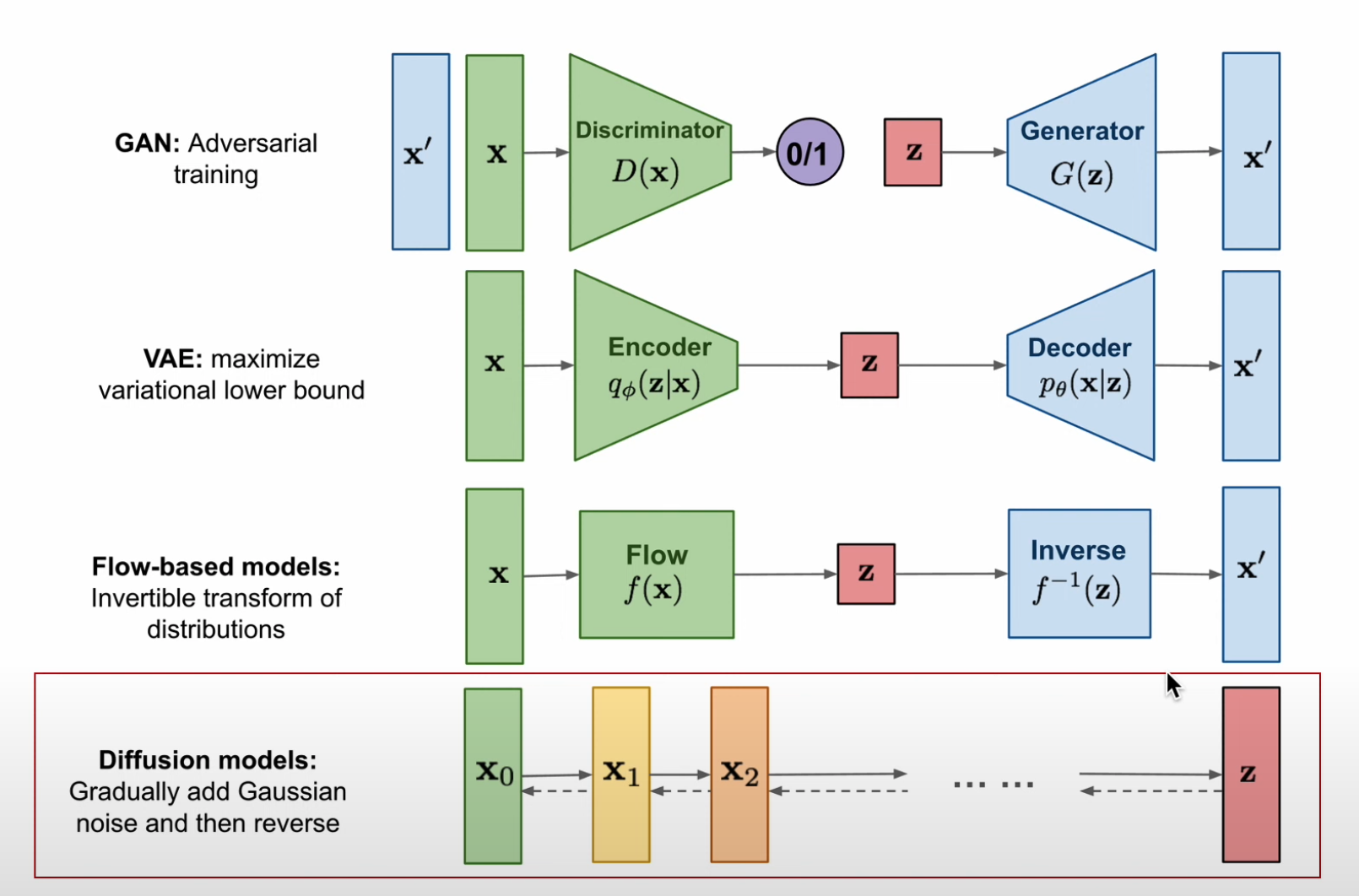
- 최근 몇 년간 다양한 생성 모델(deep generative models) 이 높은 품질의 샘플을 생성하는 성과를 보였다.
- 에너지 기반 모델(Energy-Based Models) 및 Score Matching 기법도
GAN과 비슷한 수준의 이미지 품질을 생성하는 연구가 등장했다.
- 이 논문은
Diffusion Probabilistic Models의 발전이다.
Diffusion Probabilistic Models (DPMs, 2015):Markov chain을 기반으로 데이터를 점진적으로 샘플링하는 모델
Markov Chain이란?
- 어떤 시간에 특정 state에 도달하든, 그 이전에 어떤 state를 거쳐왔든 다음 state로 갈 확률은 항상 같다는 성질이다.DPMs는 변분 추론을 활용해 샘플을 생성하기 위해 **확산 과정(diffusion process)을 반전(reverse)**시키는 방법을 학습한다.
변분 추론(variational inference) :확률 모델에서 복잡한후행 확률 분포(posterior distribution)를 근사하는 방법 중 하나이다.- 정확한
posterior를 계산하는 것은intractable하여 $p(z|x)$를 계산하는 것 대신 $q_\theta(z|x)$로 근사하는 방법이다.
- 정확한
- 즉, 변분 추론을 통해
모델의 역방향 과정의 확률 분포( $p(x_\text{t-1} | x_t)$ )를 근사하여, $p_\theta(x_\text{t-1} | x_t)$ 를 통하여 정방향 과정에서 추가된 노이즈를 제거하는 방법을 학습
DPMs은 정의하기 쉽고 학습이 효율적이지만, 지금까지 고품질 샘플을 생성할 수 있다는 실증적인 연구가 부족했다.
- 하지만 이 논문(
DDPM)에서DPMs이 고품질 샘플을 생성하고, 때때로 다른 모델보다 더 좋은 성능을 보인다.
DDPM을 특정 방식으로 파라미터화 하면 다중 노이즈 수준에서Denoising Score Matching과 동일하며,Annealed Langevin Dynamics와도 유사한 샘플링 방식을 갖는다는 점을 발견 한다.
46번에서 자세하게 설명을 한다.
DDPM도 샘플의 품질은 뛰어나지만,log-likelihood기반 모델들과 비교했을 때 경쟁력 있는 성능이 존재하진 않는다.
Loss중 많은 부분이 눈에 보이지 않는 미세한 이미지 세부 정보를 설명하는데 사용이 된다.log-likelihood model :VAE,Normalizing Flows,Autoregressive Models- log 가능도를 최대화 하는 모델들
Background
4번에서DPMs는 정방향 과정에서 추가된 노이즈(destroy)를 제거하는 방법을 학습하는 과정을 수행한다고 설명하였다.
- 물리학적으로 미세한 세계에서는 destroy된 상태를 backward로 복원시키는 것이 가능하다.
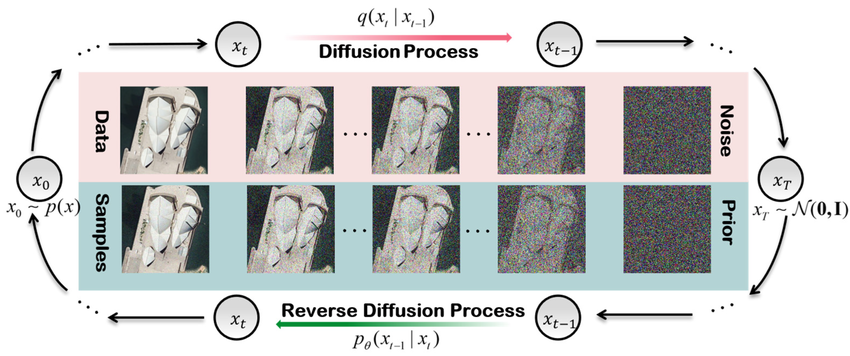
DDPM에서는 노이즈를 점차 추가하여 destroy하는 정방향 과정을diffusion process이라고 한다.
- 또한,
노이즈를 제거(denoising)하여 다시 복원하는 확률 분포(노이즈)를 학습하는 과정을reverse process라고 한다.
Diffusion Process
Diffusion Process에 대해서 먼저 간단한 설명을 해보려고 한다.
$$ q(x_\text{1:T} | x_0) := \prod_\text{t=1}^T q(x_t | x_\text{t-1}), \quad q(x_t | x_\text{t-1}) := \mathcal{N}(x_t ; \sqrt{1 - \beta_t} x_\text{t-1}, \beta_t I) $$
Diffusion Process의 근사 후행 확률은 $q(x_\text{1:T}|x_0)$ 으로 나타낼 수 있으며, 이는마르코프 연쇄(Markov Chain)로 정의되어 이 과정에서 step마다가우시안 노이즈를 추가하는 방식으로 작동한다.
- 이때
노이즈는 $\beta_1, … ,\beta_T$ 의 형태인variance schedule에 따라 조절된다.
- $\beta_t$ 는
reparameterization trick에 의해서 학습이 될 수도 있고, 하이퍼파라미터로 고정될 수 있다.
-
다음은 $\beta_t$ 에 대하여
reparameterization trick을 적용한 것을 알아본 것이다.$\beta_t$에 대하여 reparameterization trick을 적용 한 경우
-
$\beta_t$ 를
gaussian 분포에서 샘플링하는 확률적 변수로 설정한다면:$\beta_t = \sigma(\tilde{\beta_t}),\qquad \tilde{\beta_t} \sim \mathcal{N}(\mu_\beta, \sigma_\beta^2) $
- $\tilde{\beta_t}$ : 가우시안 분포에서 샘플링 된 값
- $\sigma(\cdot)$ : activation function을 활용하여 $\beta_t$가 양수임을 보장
- $\mu_\beta, \sigma_\beta $ : 학습 가능한 파라미터
-
위 식의 $\tilde{\beta_t}$ 을
gaussian 분포에서 직접 샘플링 하기 때문에 이는 확률적 연산이 포함되므로 미분이 불가능해진다.- 미분이 불가능해지면 손실 함수의 그라디언트를 계산할 수 없게 된다. (학습 불가능)
-
그렇기 때문에 미분 가능해지기 위하여 $\beta_t$ 에
gaussian 분포에서 직접 샘플링하는 대신,표준 정규 분포에서 샘플링한 후, 변형하는 방법인reparametrization trick의 방법을 사용한다. -
해당 방법을 사용하면 다음과 같이 표현 될 수 있다:
$\tilde{\beta_t} = \mu_\beta + \sigma_\beta \cdot \epsilon, \quad \epsilon \sim \mathcal{N}(0, 1)$ -
이제 확률적 연산을 결정적 연산으로 변경하여 $\tilde{\beta_t}$ 를 샘플링하는 과정이 미분 가능해졌다.
-
따라서
경사 하강법(Gradient Descent)을 사용하여 $ \mu_\beta $와 $ \sigma_\beta $ 를 학습할 수 있게 된다.
-
- $\beta_t$ 가 매우 작을 때
diffusion process와reverse process에서 모두gaussian 분포를 따르게 되어 동일한 수식 형태를 유지 할 수 있다.
diffusion process에서 결국 $\beta_T$ 시점에 가면 gaussian 분포랑 같게 형성이 된다.reverse process에서gaussian 분포를 유지하며 근사가 가능해진다.- 그렇게 되면
reverse process에서diffusion process를 예측하기 쉬워지게 된다.
- 그렇게 되면
- 그리고 $\beta_t$ 를
learnable parameter로 둘 수 있지만, 실험을 해보니constant로 두어도 큰 차이가 없어서constant로 두었다. (Forward process and L_T ,Experiment부분)
-
초기의 $\beta_t$ 의 값을 작게 설정하다가 T가 증가할수록(
= gaussian distribution 에 가까워질수록) 값을 크게 설정한다. (linear하게 증가) -
본 논문에선
constant로 설정하여도 $x_T$ 시점에서pure isotropic gaussian을 확보할 수 있다고 주장한다.Pure Isotropic Gaussian이란?
- 평균 $\mu$ 가 0인 경우, 공분산 행렬이 $\sum = \sigma^2I$ 형태로 주어지며, 모든 차원의 분산이 동일하고 독립적인 경우이다.
- 등방성(방향성이 없음)이 유지가 된다.
- 즉, 분포가 표준 가우시안 $\mathcal{N}(0,\mathcal{I})$ 형태를 가질 때를 나타낸다.
- 평균 $\mu$ 가 0인 경우, 공분산 행렬이 $\sum = \sigma^2I$ 형태로 주어지며, 모든 차원의 분산이 동일하고 독립적인 경우이다.
-
이 때문에
reverse process를 시작할 때사전 분포(prior distribution)이 $\mathcal{N}(0,\mathcal{I})$ 로 설정되어gaussian 분포를 유지하게 된다.
- 또한, $q(x_\text{1:T}|x_0)$ 을 위 식 그대로 $\beta_t$로 계산하게 되면 문제점이 있다.
- $x_0$(original image)에서 $x_T$(noisy image)로 전개될 때, 0~T의 모든 수식을
step by step으로 전개해야된다.
- 이는,
memory를 많이 소모하며, 시간이 오래걸리는 단점이 있다.
$$\alpha_t := 1 - \beta_t ,\quad \bar{\alpha_t} := \prod_\text{s=1}^{t} \alpha_s$$
$$q(x_t \mid x_0) = \mathcal{N}(x_t; \sqrt{\bar{\alpha}_t} x_0, (1 - \bar{\alpha}_t) \mathbf{I})$$
- 그렇기 때문에 $q$ 의 식을 위와 같은 수식으로 변경하여
폐쇄형 해(closed-form solution)으로 샘플링 가능하기 때문에 임의의 시간 $t$ 에서 샘플링 $x_t$를 직접 계산할 수 있게 된다.
-
이렇게 일반화 식을 만들면
stochastic gradient descent을 이용하여 효율적인 학습이 가능하다.폐쇄형 해(closed-form solution)이란?
- 어떤 수학적 문제의 해(해결 방법)를 유한한 개수의 기본 연산(+, -, ×, ÷, √, exp, log 등)으로 정확하게 표현할 수 있는 경우
- 수식을 직접 계산할 수 있는 형태
증명 확인
$ \begin{aligned} q(x_t \mid x_{t-1}) &= \mathcal{N}(x_t; \sqrt{1 - \beta_t} x_{t-1}, \beta_t I) \text{이므로 reparametrization trick을 사용한다면} \end{aligned} $ $$ \begin{aligned} x_t &= \sqrt{1 - \beta_t} x_{t-1} + \sqrt{\beta_t} \epsilon_{t-1} \quad &(\epsilon_{t-1} \sim \mathcal{N}(0, I)) \\\\ &= \sqrt{\alpha_t} x_{t-1} + \sqrt{1 - \alpha_t} \epsilon_{t-1} \\\\ &= \sqrt{\alpha_t} (\sqrt{\alpha_{t-1}} x_{t-2} + \sqrt{1 - \alpha_{t-1}} \epsilon_{t-2}) + \sqrt{1 - \alpha_t} \epsilon_{t-1} \quad &(\epsilon_{t-2} \sim \mathcal{N}(0, I)) \\\\ &= \sqrt{\alpha_t \alpha_{t-1}} x_{t-2} + \sqrt{(1 - \alpha_{t-1}) \alpha_t} \epsilon_{t-2} + \sqrt{1 - \alpha_t} \epsilon_{t-1} \\\\ \end{aligned} $$ $ \begin{aligned} \alpha_t (1 - \alpha_{t-1}) + 1 - \alpha_t = 1 - \alpha_t \alpha_{t-1} \text{이므로} (1 - \alpha_t \alpha_{t-1}) I \text{이고 대입하면,} \end{aligned} $ $$ \begin{aligned} x_t &= \sqrt{\alpha_t \alpha_{t-1}} x_{t-2} + \sqrt{1 - \alpha_t \alpha_{t-1}} \epsilon_{\text{t-2}}^{\prime}, \quad &(\epsilon_{\text{t-2}}^{\prime} \sim \mathcal{N}(0, I)) \\\\ &= \sqrt{\alpha_t \alpha_{t-1} \alpha_{t-2}} x_{t-3} + \sqrt{1 - \alpha_t \alpha_{t-1} \alpha_{t-2}} \epsilon_{\text{t-3}}^{\prime}, \quad &(\epsilon_{\text{t-3}}^{\prime} \sim \mathcal{N}(0, I)) \\\\ &= \cdots \\\\ &= \sqrt{\bar{\alpha}_t} x_0 + \sqrt{1 - \bar{\alpha}_t} \epsilon'_0, \quad &(\epsilon'_0 \sim \mathcal{N}(0, I)) \end{aligned} $$ $ \begin{aligned} \text{따라서,} \quad q(x_t \mid x_0) = \mathcal{N}(x_t; \sqrt{\bar{\alpha}_t} x_0, (1 - \bar{\alpha}_t) I)이다. \end{aligned} $
- 결론적으로
diffusion process는 $x_0$을 조건부로latent variables($x_\text{1:T}$)를 생성해내는 과정이다.
Reverse Process
- 다음은
Reverse Process에 대한 설명이다.
Reverse process는diffusion process의 역과정으로,gaussian noise를 제거해가며 특정한 패턴을 만들어가는 과정
Reverse Process는diffusion process에서 만든 $x_T$(noise)를 다시 복원해야 하는데, 이때 $q(x_\text{t-1} \mid x_t)$를 바로 구할 수 없다.
- 그래서 모델 학습이 필요한 이유이다.
- 따라서 $q$를
approximation하는 $p_\theta$ 를 $p_\theta(x_\text{t-1} | x_t) \sim q(x_\text{t-1} | x_t) $ 와같이 정의한다. 이를 식으로 표현하면 아래와 같다.
$$ p_\theta(x_\text{0:T}) := p(x_T) \prod_{t=1}^{T} p_\theta(x_\text{t-1} \mid x_t), \quad p_\theta(x_\text{t-1} \mid x_t) := \mathcal{N}(x_\text{t-1}; \mu_\theta(x_t, t), \Sigma_\theta(x_t, t)) $$
- 위 식의 $\mu_\theta(x_t, t)$ 와 $\Sigma_\theta$ 는 학습되어야 할 parameter들이고,
위 식의 시작 지점인 $x_T$의 분포는 $p(x_T) = \mathcal{N}(x_T;,0,I)$ 로
표준정규분포로 정의한다.
Object Function (Loss)
- 이젠 $p_\theta$를 추정하기 위하여
model의 학습 방법을 알아보겠다.
Model의 목적은실제 data의 분포인 $p_\theta(x_0)$을 찾아내는 것을 목적으로 하기 때문에 결국 이의likelihood를 최대화 하는 것이 목적이다.
- $p_\theta(x_0)$ 를 직접 계산하기엔 어렵기 때문에,
변분 추론(variational inference)을 사용하여diffusion process를 이용한ELBO(Evidence Lower Bound)를 유도한다.
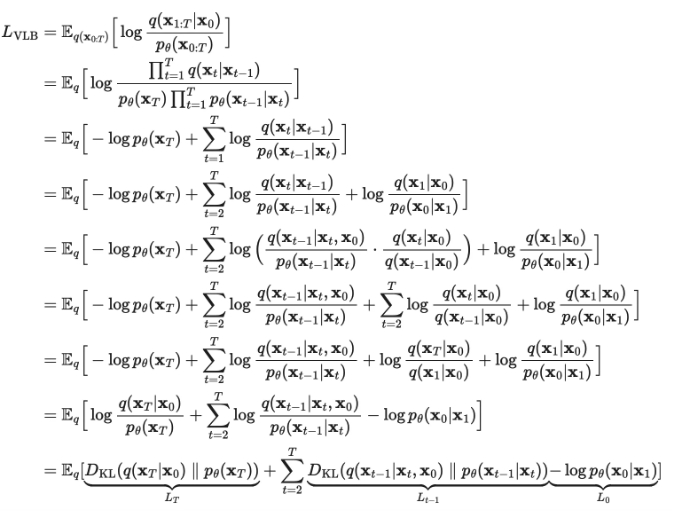
$$ \mathbb{E} \left[ - \log p_\theta(x_0) \right] \leq \mathbb{E_q} \left[ - \log \frac{p_\theta(x_\text{0:T})} {q(x_\text{1:T} \mid x_0)} \right] = \mathbb{E_q} \left[ - \log p(x_T) - \sum_{t \geq 1} \log \frac{p_\theta(x_\text{t-1} \mid x_t)}{q(x_t \mid x_\text{t-1})} \right] =: L $$
자세한 증명 보기
$$ \begin{aligned} -\log p_\theta(x_0) &\leq -\log p_\theta(x_0) + D_\text{KL} \left( q(x_\text{1:T} | x_0) || p_\theta(x_\text{1:T} | x_0) \right) \\\\ &= -\log p_\theta(x_0) + \mathbb{E_{x_\text{1:T} \sim q(x_\text{1:T} | x_0)}} \left[ \log \frac{q(x_\text{1:T} | x_0)}{p_\theta(x_\text{0:T}) / p_\theta(x_0)} \right] \text{($\log$의 분모가 $x_\text{0:T}$ 인 이유는 아직 모르겠다.)} \\\\ &= -\log p_\theta(x_0) + \mathbb{E_{x_\text{1:T} \sim q(x_\text{1:T} | x_0)}} \left[ \log \frac{q(x_\text{1:T} | x_0)}{p_\theta(x_\text{0:T})} + \log p_\theta(x_0) \right] \\\\ &= \mathbb{E_q} \left[ \log \frac{q(x_\text{1:T} | x_0)}{p_\theta(x_\text{0:T})} \right] \\\\ &= \mathbb{E_q} \left[ -\log \frac{p_\theta(x_\text{0:T})}{q(x_\text{1:T} | x_0)} \right] \\\\ \end{aligned} $$- 2번째 식에서 $\log$ 의 분모식이 $x_\text{0:T}$ 인 이유를 추론해보자면
ELBO는 상한을 설정하는 것이다. - 따라서, 전체 확률 분포 $p_\theta(x_\text{0:T})$를 기준으로 변분 추론을 전개하고 있다고 생각이 든다.
- 그렇기 때문에 이를 식으로 나타내면
위의 식과 같다.
위의 식을 좀 더 쉽게 계산하기 위해 아래와 같은Gaussian분포 간의KL divergence형태로 식을 변형한다.
$$ \mathbb{E_q} \Bigg[ D_\text{KL} \left( q(x_T | x_0) || p(x_T) \right) + \sum_{t > 1} D_\text{KL} \left( q(x_\text{t-1} | x_t, x_0) || p_\theta(x_\text{t-1} | x_t) \right)- \log p_\theta(x_0 | x_1)\Bigg] $$
- 왼쪽 항 부터 $L_T, L_\text{T-1}, L_0$ 이다.
자세한 증명 보기
- 위 식에서
각각의 term이 가지는 의미를 하나씩 살펴보면 다음과 같다.
- $L_T$(regularization) : $p$ (diffusion process)가
generate하는 $noise(x_T)$와 $q$가 $x_0$ 라는 데이터가 주어졌을 때generate하는 $noise(x_T)$ 간의 분포 차이이다.
- $L_\text{T-1}$(denoising process) : $p$와 $q$의
reverse/forward process의 분포 차이이다. 이들을 최대한 비슷한 방향으로 학습한다.
- 즉, $p$라는
조건부 gaussian 분포는 $q$라는조건부 gaussian 분포를approximation하도록 학습이 된다는 것을 알 수 있다.
- $L_0$(reconstruction) : latent $x_1$으로부터 data $x_0$를 추정하는 likelihood. 이를 maximize하는 방향으로 학습한다.
negative log likelihood이므로maximize하는 방향으로 학습이 된다.
- 각 term들의 자세한 내용은
Diffusion models and denoising autoencoders에서 다루겠다.
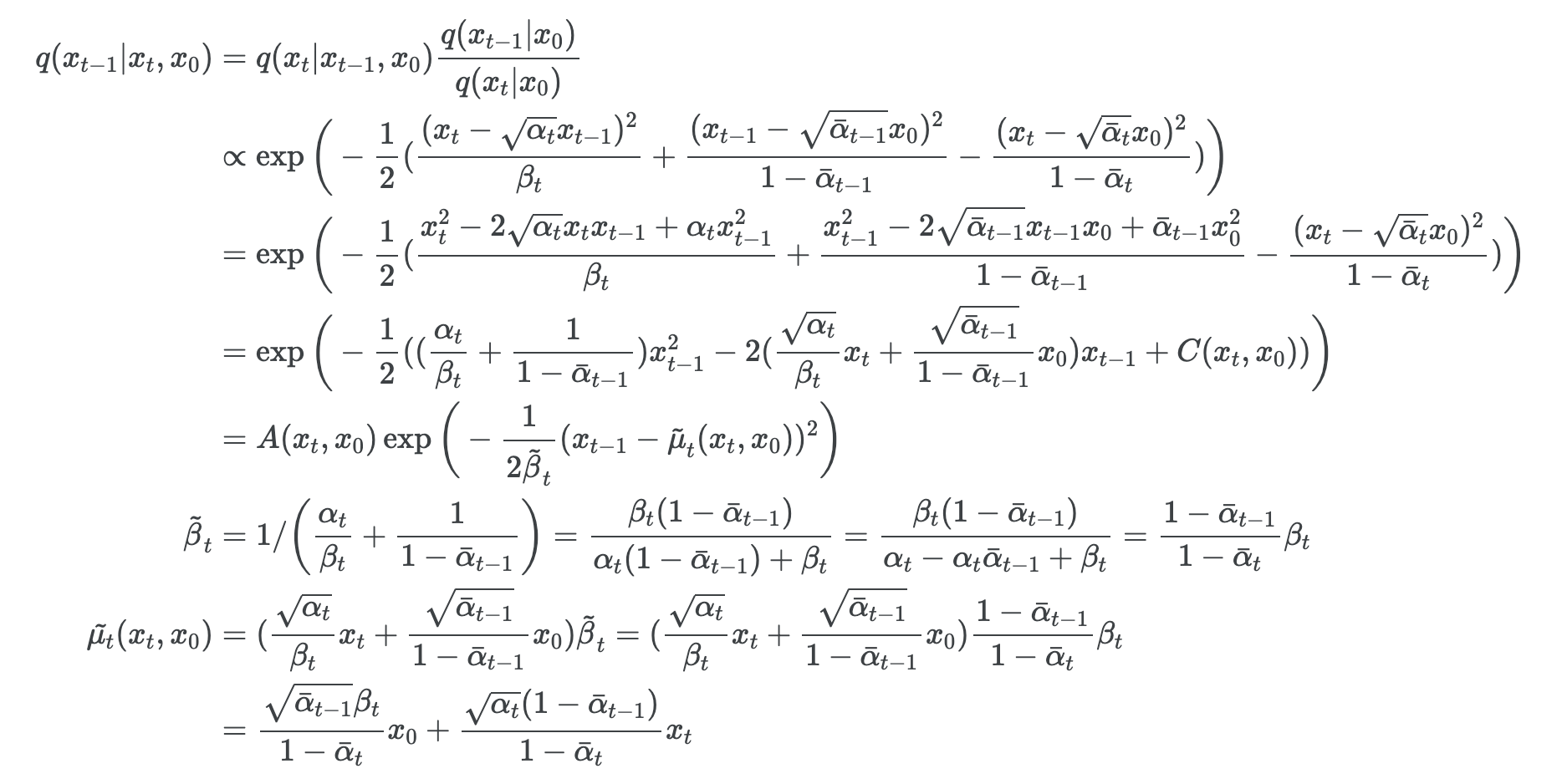
- 마지막으로 $q(x_\text{t-1} | x_t)$ 는 계산하기 어렵지만 $q(x_\text{t-1} | x_t,x_0)$는 쉽게 계산을 할 수 있게 된다. 해당 식과 자세한 증명은 아래에 있다.
- $x_t$에서 $x_\text{t-1}$을 바로 구하는 것은 어렵지만 $x_0$을 조건으로 주면 쉽게 구할 수 있다.
$$ q(x_{t-1} | x_t, x_0) = \mathcal{N} \left( x_{t-1} ; \tilde{\mu}_t(x_t, x_0), \tilde{\beta}_t I \right), $$
$$\text{where} \quad \tilde{\mu_t} (x_t, x_0) := \frac{\sqrt{\bar{\alpha_\text{t-1}}} \beta_t}{1 - \bar{\alpha_t}} x_0 + \frac{\sqrt{\alpha_t} (1 - \bar{\alpha_{t-1}})}{1 - \bar{\alpha_t}} x_t\quad \text{and} \quad\tilde{\beta_t} := \frac{1 - \bar{\alpha_{t-1}}}{1 - \bar{\alpha_t}} \beta_t $$
자세한 증명 보기
Diffusion models and denoising autoencoders
Diffusion model의 설계 시 foward process, $\beta_t$, model 구조 등의 선택에 따라 달라지는 복잡한 모델이다.
- 해당 챕터에서는 이를 단순화 하기 위한 방법을 설명을 한다.
Forward process and $L_T$
16번에서 설명했듯이 $\beta_t$를learnable parameter로 두는 것이 아니라,constant로 고정한다.
- 따라서,
28번에서 설명한 최종Loss term중 $L_T$의 식에서 posterior $q$는 학습이 되는 파라미터가 존재하지 않는다.
- 그래서 학습 중에 무시할 수 있게 된다.
Reverse process and $L_\text{1:T −1}$
23번의reverse process의 식 $p_\theta(x_\text{t-1} \mid x_t) := \mathcal{N}(x_\text{t-1}; \mu_\theta(x_t, t), \Sigma_\theta(x_t, t))$ 에서 $\mu_\theta(x_t, t)$ 와 $\Sigma_\theta$ 는 학습되어야 할parameter들이라고 설명한 바가 있다.
- $\mu_\theta(x_t, t)$는 평균, 즉 모델이 예측하는 깨끗한 데이터 $x_\text{t-1}$ 의 값
- $\Sigma_\theta$ 는 분산, 즉 모델이 예측한 값의 불확실성
- 주입된
noise 크기인 $\beta_t$를 이미 알고있기 때문에 이를 활용하여 분산($\Sigma_\theta$)을 대신 한다.학습 대상이었던 분산을 각 시점에서 누적된 노이즈 크기로 상수화 하게 된다.
-
논문에서는 $\sigma^2 = \beta_t$ 와 $\sigma^2 = \tilde\beta_t$ 의 실험 결과가 비슷하다고 설명한다.
두개의 차이점
- $\sigma^2 = \beta_t$ : 단순히 정방향 과정에서 사용된 $\beta_t$ 값을 그대로
reverse process에서 사용하겠다는 방법이다. - $\sigma^2 = \tilde\beta_t$ : 정방향 과정에서
누적된 노이즈도 반영하겠다는 방법이다. Diffusion model은다중 스텝을 거치므로개별 스텝의 미세한 차이는 결과에 큰 영향을 미치지 못하기 때문에 결과가 비슷하다.- 즉, 스텝별 미세한 분산 차이가 최종적으로 누적될 때 무시할 수 있을 정도로 작을 수 있다.
- $\sigma^2 = \beta_t$ : 단순히 정방향 과정에서 사용된 $\beta_t$ 값을 그대로
- 따라서 $\Sigma_\theta(x_t, t) = \sigma_t^2 = \tilde\beta_t = t$시점까지의 누적된 $noise$ 가 된다.
- $\tilde{\beta_t} := \frac{1 - \bar{\alpha_{t-1}}}{1 - \bar{\alpha_t}} \beta_t$
- 평균 $\mu_\theta(x_t, t)$ 만이 학습되어야 할
parameter이다.
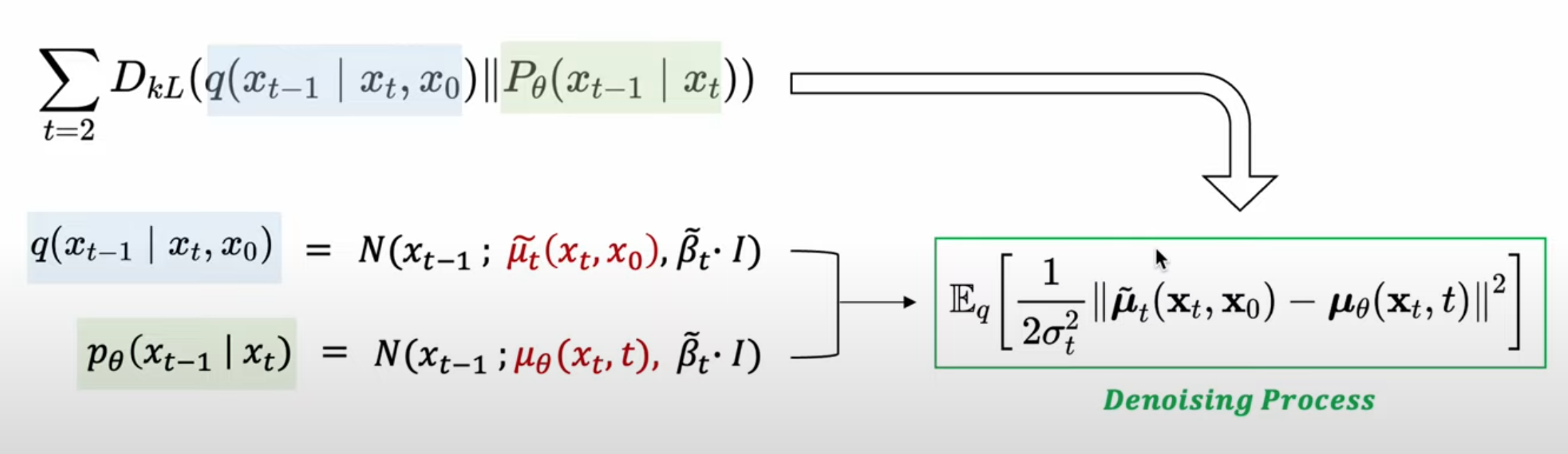
- 그렇기 때문에
위 그림처럼denoising processloss term($L_\text{t-1}$)의 목적식을 재구성 할 수 있게 된다.
- 평균만이 학습대상이므로, 각각의
mean function간의 차이로 재정의 할 수 있게 된다.
$$ x_t(x_0, \epsilon) = \sqrt{\bar{\alpha}_t} x_0 + \sqrt{1 - \bar{\alpha}_t} \epsilon, \quad \epsilon \sim \mathcal{N}(0, I) $$
19번의 식을reparametrization trick을 사용하여 표현하면위 식이 된다. 이 식을위 그림에 대입 하면아래의 수식으로 정리가 된다.
$$\mathbb{E_{x_0, \epsilon}} \Bigg[ \frac{1}{2 \sigma_t^2} \Big|\Big| \frac{1}{\sqrt{\alpha_t}} \Big( x_t(x_0, \epsilon) - \frac{\beta_t}{\sqrt{1 - \bar{\alpha}_t}} \epsilon \Big) - \mu _ {\theta} \Big( x_t(x_0, \epsilon), t \Big) \Big|\Big|^2 \Bigg] $$
위 수식을 보면 $\mu _ {\theta} (x_t, t)$ 는 주어진 $t$시점에 $\frac{1}{\sqrt{\alpha_t}} ( x_t - \frac{\beta_t}{\sqrt{1 - \bar{\alpha}_t}} \epsilon)$의 식을 예측을 해야되는 것을 알 수 있다.
- $x_t$(input) 와 $t$는 주어진다. 따라서
남은 예측 대상(변수)은noise($\epsilon$) 뿐이다.
- $\epsilon$을 제외한 나머지 변수는 구할 수 있는 값들이다.
- 또한 이는 $p$분포의 평균($\mu _ {\theta}$)이 $q$분포의 평균($\frac{1}{\sqrt{\alpha_t}}$)을 예측하는 것으로 생각할 수 있다.
- 다르게 생각한다면,
p분포를q분포를 기반으로parameterization해서 얻을 수 있다면 더욱 간단할 것이다. 아래는 그렇게 변형한 수식이다.
6번에 대한 설명- 이 부분이
denoising matching의 핵심이다.
- 이 부분이
$$ \mu_{\theta}(x_t, t) = \tilde{\mu_t} \left( x_t, \frac{1}{\sqrt{\bar{\alpha_t}}} \left( x_t - \sqrt{1 - \bar{\alpha_t}} \epsilon _ {\theta}(x_t) \right) \right) = \frac{1}{\sqrt{\alpha_t}} \left( x_t - \frac{\beta_t}{\sqrt{1 - \bar{\alpha_t}}} \epsilon_{\theta}(x_t, t) \right) $$
- 위 식을 이용하면 $x_\text{t-1}$을 바로 계산하는 것이 아니라 noise($\epsilon$)을 예측하여 $x_t$에서 빼는 방식을 취한다.
- 최종적으로
44번 위 수식과위 수식을 조합한다면 DDPM의 최종 Loss Term이 도출 된다.
본 논문에선계수 term을 제외한 식의Loss를 사용한다.Loss가 굉장히 간단한 식으로 정의된다.- Noise를 예측하는 방식의 훈련이 진행되도록 설계가 되었다.
$$ \text{Loss} _ {\text{DDPM}} = \mathbb{E_{x_0, \epsilon}} \Bigg[ \frac{\beta_t^2}{2 \sigma_t^2 \alpha_t (1 - \bar{\alpha}_t)} \Bigg| \epsilon - \epsilon _ {\theta} \big( \sqrt{\bar{\alpha}_t} x_0 + \sqrt{1 - \bar{\alpha}_t} \epsilon, t \big) \Bigg|^2 \Bigg] $$
$$ = \mathbb{E_{x_0, \epsilon}} \Bigg[ \Big( \epsilon - \epsilon _ {\theta} \big( \sqrt{\bar{\alpha}_t} + \sqrt{1 - \bar{\alpha}_t} \epsilon, t \big) \Big)^2 \Bigg] $$
Experiment
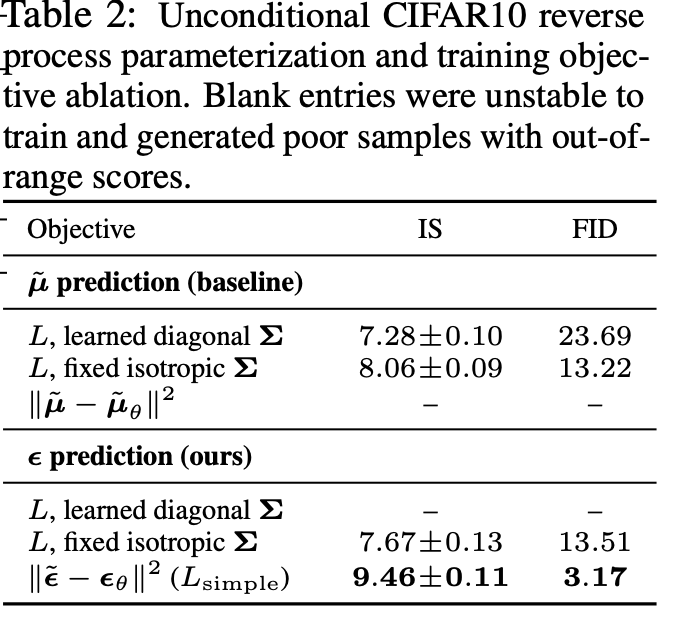
- 평균을 예측하는 것이 아니라, noise를 예측하는게 결과가 더 좋게 나온다.
- 또한
마지막 Loss에서계수 term을 제거한 것이 더욱 결과가 좋게 나온다고 나온다.
- 왜냐하면
계수 term에서 $t$가 증가할 수록 분모가 더 빠르게 증가하기 때문에, $t$가 증가할수록 그 값이 작아지는 경향을 갖게 된다.
계수 term은 Loss에서 가중치 역할을 하게 된다.- 항이 크면 손실이 더 강조, 작으면 덜 강조가 된다.
- 따라서
계수 term이 있으면 $T$(large t)시점에선 줄어들기 때문에 결론적으로Loss의 영향이 줄어들게 된다.
- 그렇기 때문에
계수 term을 제외한 학습의 결과가 더 좋게 나온다.
- $T$(large t)의 Loss 비중을 높여, 모델이
noise가 심한 이미지(large t시점의 상태)의denoising에 집중하도록 유도가 된다.
Implement
- 코드에 대한 구현은 여기에 해두었다.
Reference
-
전체 흐름
-
논문 이해 참고
-
기타 지식
- https://www.youtube.com/watch?v=vy8q-WnHa9A (reparametrization trick)
-
논문 구현