[CS231n] 06.Training Neural Networks I
Contents
개요
CS231n의 6강에 대한 내용을 정리 할 것이다.
- 저번 강에서는
Convolutional Neural Networks에 대해 배웠고 이번 강에서는 이Neural Networks를 어떻게 하면 잘 학습시킬 수 있을지에 대해서 배울 것이다.
Activation Function
Deep Network에비선형성을 부여하는Activation Function의 종류들에 대해서 알아볼 것이다.
Sigmoid
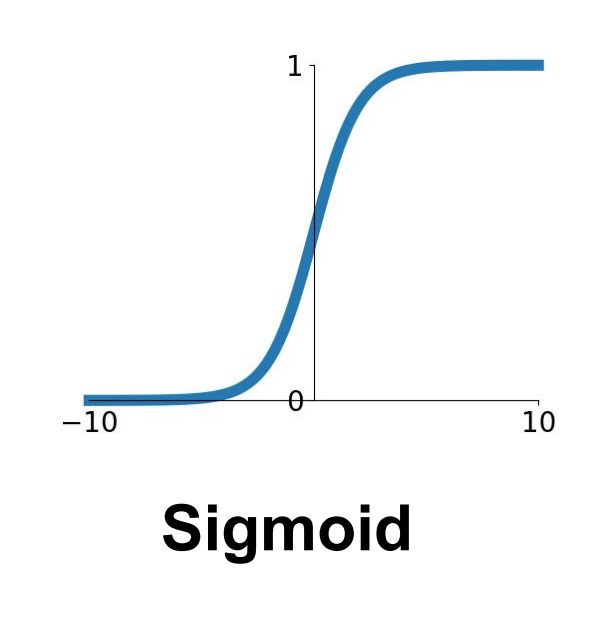
$$\sigma(x) = \frac{1}{1 + e^{-x}}$$
- 먼저 첫 번째로
Sigmoid이다. 함수의 모양은위 그림과 같고 (0,1) 사이의 값을 가지게 된다.Sigmoid가 가지게 되는 몇가지 문제들이 있다.
-
첫 번째 문제는 경사도를 죽일 수 있는 문제이다.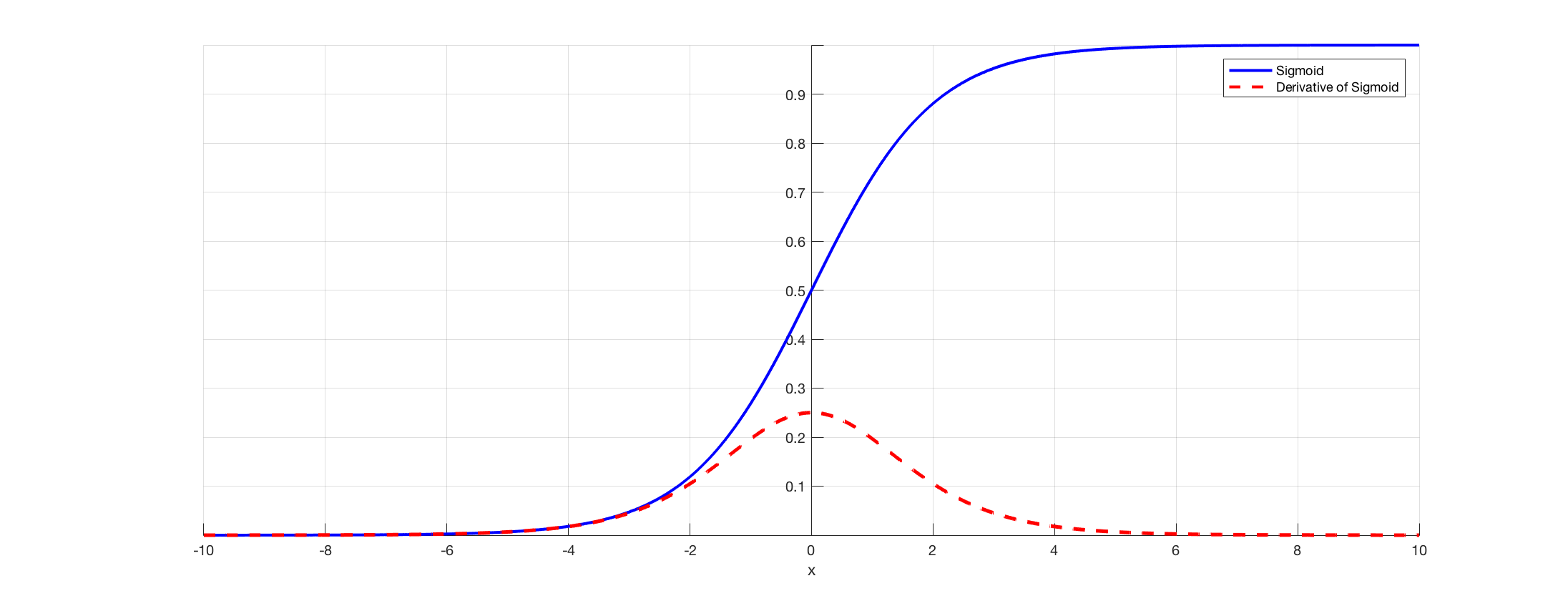
- 이는 입력으로 들어오는 x가 -10, 10이라면
global gradient(이전 노드의 기울기)는 0이 되고 이것이 역전파를 통해 다운스트림($global grdient * local gradient$) 되면global gradient가 0이므로 아래 노드들은 0으로 수렴하게 되어 기울기가 소실이 된다.- 이러한 기울기 소실로 인하여
W의 값을 더이상 update 하지 못하는 문제를vanishing gradient라고 한다.
- 이러한 기울기 소실로 인하여
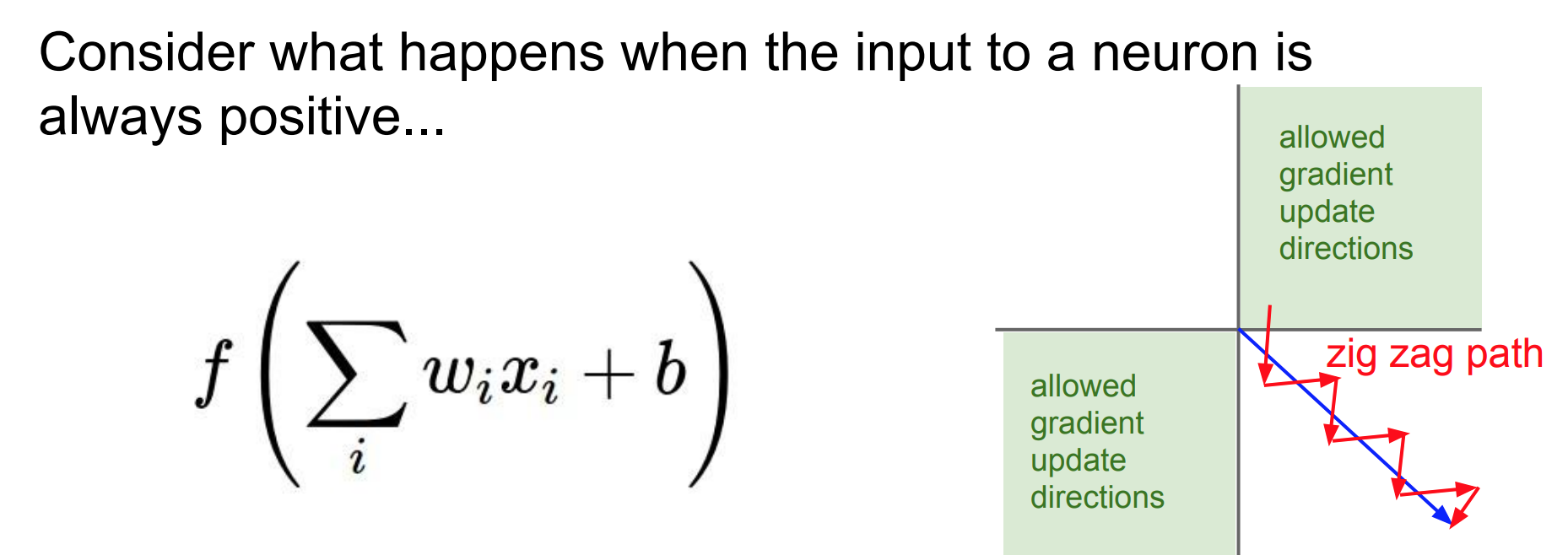
두 번째 문제는 output이 zero-center가 아닌 문제이다. 즉,Signmoid의 output이 항상 양수이기 때문에 0을 중심으로 있지 않는 문제가 발생하게 된다.
- ouput이 항상 양수 이라면 입력값 또한 양수인 것인데, 그렇게 된다면
back propagation에서 $\frac{dl}{df} * \frac{df}{wi}$ 로W의 기울기를chain-rule로 구하게 된다.
- 근데 우리가 이전
4강에서 배운chain-rule의pattern중mul gate(곱)일 때grdient가 서로 전환이 된다고 배웠다. 따라서 $\frac{df}{wi}$ 이것이 바로 $x_i$인 것을 알 수 있게 된다.- 이때 $x_i$가 이전 layer의 sigmoid 연산을 거친 output이기 때문에 무조건 양수이다.
- 입력값은 항상 양수라면
back propagation을 할 때 $\frac{dl}{df}$(global gradient이다.)의 부호를 따라가게 되어서gradient의 부호는 항상 양수이거나 음수가 된다.- 부가적으로
gradient의 부호는 다운 스트림으로 내려온gradient의 부호와 같아진다고 생각하면 쉽다.
- 부가적으로
- 이렇게 부호가 모두 양수 또는 음수가 되어버리면 발생하는 문제는
gradient update를 할 때 나타난다.
w1,w2가 있다면gradient update시 항상 (+)(+) 이거나 (-)(-)가 된다. 따라서 위 그림과 같이 파란색 방향(최적의gradient update)과는 다르게 비효율적으로 지그재그 방향으로 내려가게 되는 상황이 벌어지게 된다.
- 이를 해결할 수 있는 방법은
input값에mean을 모두 빼버리면zero-mean data가 된다. 그렇게 되면 X가 양수/음수를 모두 가지고 있는 상황을 만들 수 있게 된다.
- 마지막
세 번째 문제는Sigmoid에서의exp의연산의 계산 비용이 많이 들어간다는 것이다.- 따라서 위 세 가지의 문제로 잘 사용하지 않게 된다.
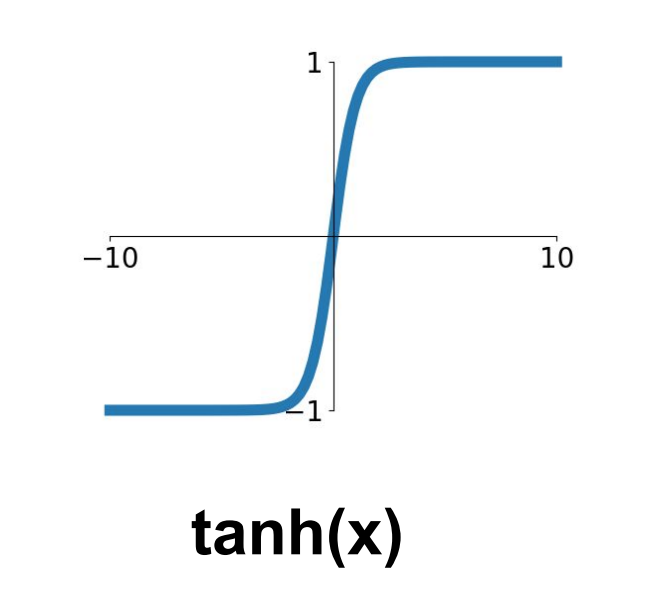
tanh
- 다음은
tanh함수이다. 이는 범위를 (-1,1)까지 하여Sigmoid의 단점인non-zero-center문제를 해결하게 되었다.
- 하지만 여전히 그래프를 봐도 확인 할 수 있지만 경사도를 죽일 수 있는 문제는 해결되지 못하였다. 따라서
Network가 깊어지는 모델이 많아진 요즘 활성화 함수로 잘 사용하지 않게 된다.
ReLU
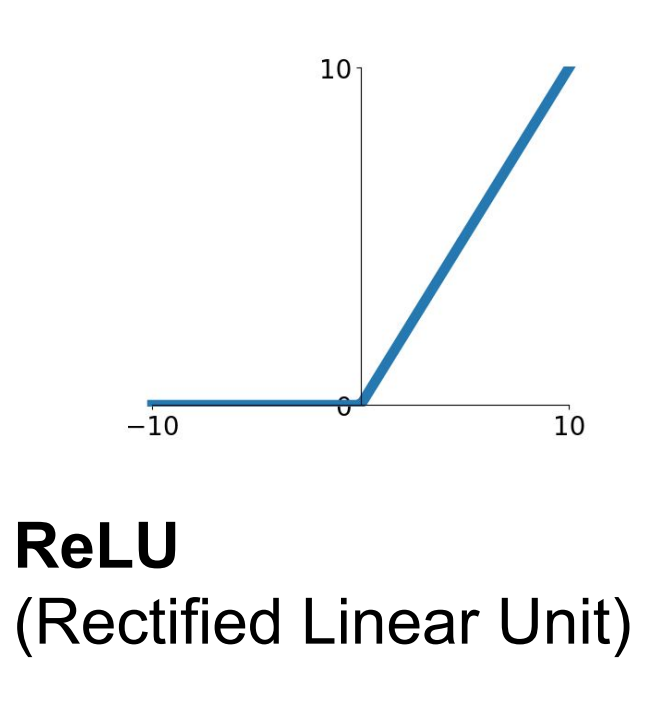
$$f(x) = max(0,x)$$
- 다음은
ReLU함수 이다. 이는위 두 함수과 다르게 양수에서 경사도를 죽일 수 있는 문제를 해결 하였다.
- 또한 이 함수는
최대값만계산하기 때문에 연산이 효율적이고 실제로 앞선 함수들과 비교하여 6배가 빠르다고 한다.
- 하지만
ReLU함수도 몇가지 문제점이 있다.Non-zero-center문제를 가지고 있고 또한 음수일 경우에는 경사도를 죽일 수 있는 문제가 발생할 수 있다.
- 따라서
W를initialization하는 과정에서 잘못되었을 때dead ReLU가 발생할 수 있다.- 따라서 이런
dead ReLU를 피하기 위하여 초기화를 할 때 positive한 bias를 얻게 초기화를 하는 방법도 있지만 효과가 경미하다.
- 따라서 이런
- 또한
learning rate를 크게 설정하는 대규모 훈련 시W가 너무 크게 비약해서 학습이 안되는 상황이 발생할 수도 있다.
- 실제로
ReLU를 사용한Network에서10~20%정도가dead ReLU에 빠진다고 한다.- 문제이긴 하지만 그럼에도 불구하고,
train은잘 된다고 한다.
- 문제이긴 하지만 그럼에도 불구하고,
Leaky ReLU
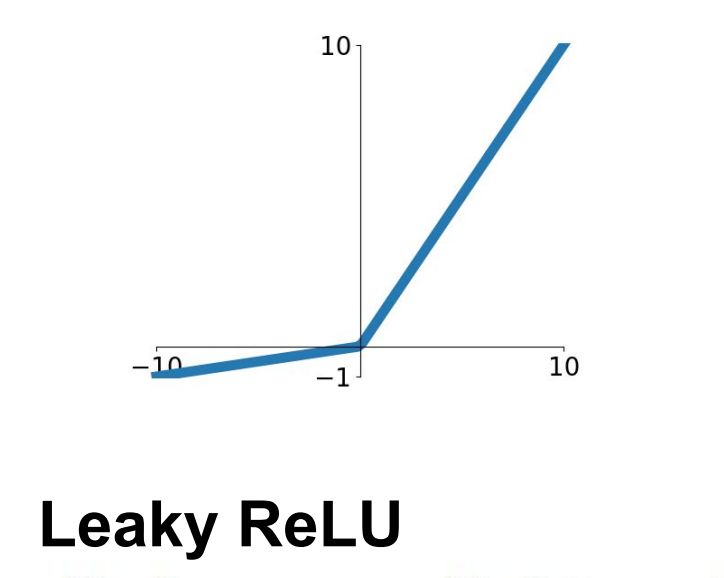
$$f(x) = max(0.01x,x)$$
ReLU와 다르게 음수에도음수 기울기를주어 경사도를 죽일 수 있는 문제를 해결하고자 한다.ReLU와 같게 연산이 빠르다는 장점도 있다.
PReLU
$$f(x) = max(ax,x)$$
PReLU는 음수 영역에backpropagation에서의파라미터로 기울기 값으로 유연성을 더해주어 조금 더 융통성을 가해 주었고
ELU
- 다음의
ELU는 평균 출력이 더욱 0에 가까워지게 만든 함수이다. 그래서 다음과 같은 장점이 있다.- 노이즈에 더욱 견고해진다.
Leaky ReLU와 비교했을 때 비활성화 상태를 더욱robust하게 얻을 수 있다.
Maxout Neuron
$$\max(w_1^T x + b_1, w_2^T x + b_2)$$
- 다은은
Maxout Neuron이다. 파라미터를 더 두어서 두가지의 function의 max를 취하게 된다.- 경사도를 죽일 수 있는 문제는 사라졌지만 뉴런 당 parameter가 2배로 증가하는 단점이 있다.
Data Preprocessing

- 다음은 좋은 데이터를 만들기 위한
data preprocessing과정에 대해 설명할 것이다.
- 일반적으로
image 데이터의경우에는zero-mean만 전처리를 수행한다.- 입력값이 전부 양수이면
W가한 방향으로만업데이트가 일어나기 때문에 비효율적이다. - 오직
첫 layer에서만zero - centering이 되고, 그 이후에 네트워크가 깊어지면 깊어질수록 활성화 함수로 값이 양수만 나와서 첫 layer 정도에만 의미가 있다.
- 입력값이 전부 양수이면
image의 경우에는normalize를 많이 하지 않는다.- 왜냐하면 image의 경우 각 위치에는 이미 상대적으로 규모와 분포가 있기 때문이다.
- 이미지는 픽셀 값이 전부 같은 범위(0~255)이기 때문이다.
- 또한 image의 경우
일부 작업(PCA, Whitening)을 하지 않는다.- 일반적으로
원본 image위에convolution layer를 통하여 공간 구조를 포함한 특징 추출을 하기 때문이다.
- 일반적으로
Zero-mean의 전처리를 할 경우 훈련데이터에서 얻은 경험적인 image의 평균을 test데이터에서 그대로 사용한다.
- 이때
mean의 값을이미지의 전체 데이터로 할지, 아니면각각 독립된 채널마다의 mean으로이용할 지 선택할 수 있는데, 이는 큰 차이는 나지 않는다고 한다.
Weight Initialization
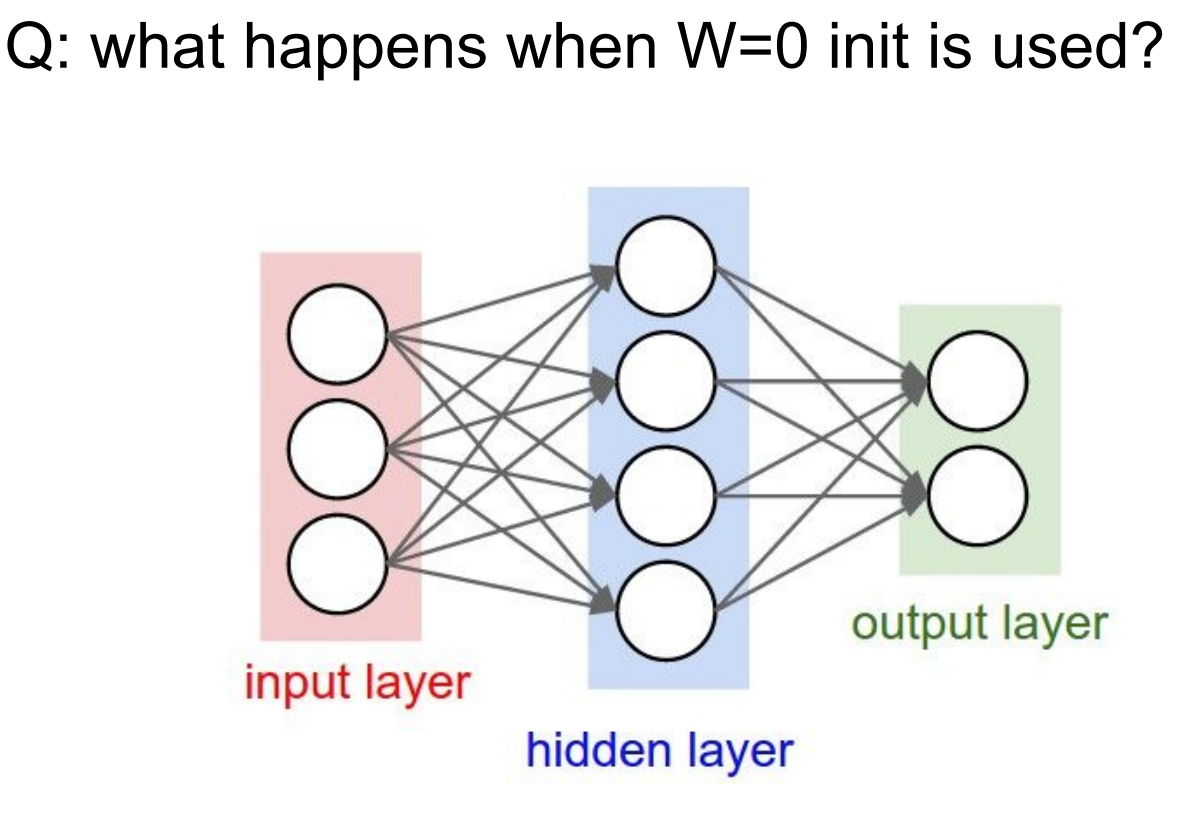
- 다음은
W를 초기화 하는 방법에 대해서 알아볼 것이다.
- 위 그림처럼 w가 0으로 초기화가 된다는 질문을 남긴다. 그렇게 되면 입력값에서부터 뉴런이 모두 동일한 결과를 내놓는다.
- 따라서
W를 초기화 시키는 여러 방법에 대해서 설명한다. 첫 번째 방법은Small random number이다.W = 0.01 * np.random.randn(D,H)
- 이 방법은 분포에서 샘플링을 할 수 있는
작은 난수로 설정하는 방법이다.- 대칭성이 없어져서
small network에서는 잘 작동하지만deep network에서는 문제이다.
- 대칭성이 없어져서
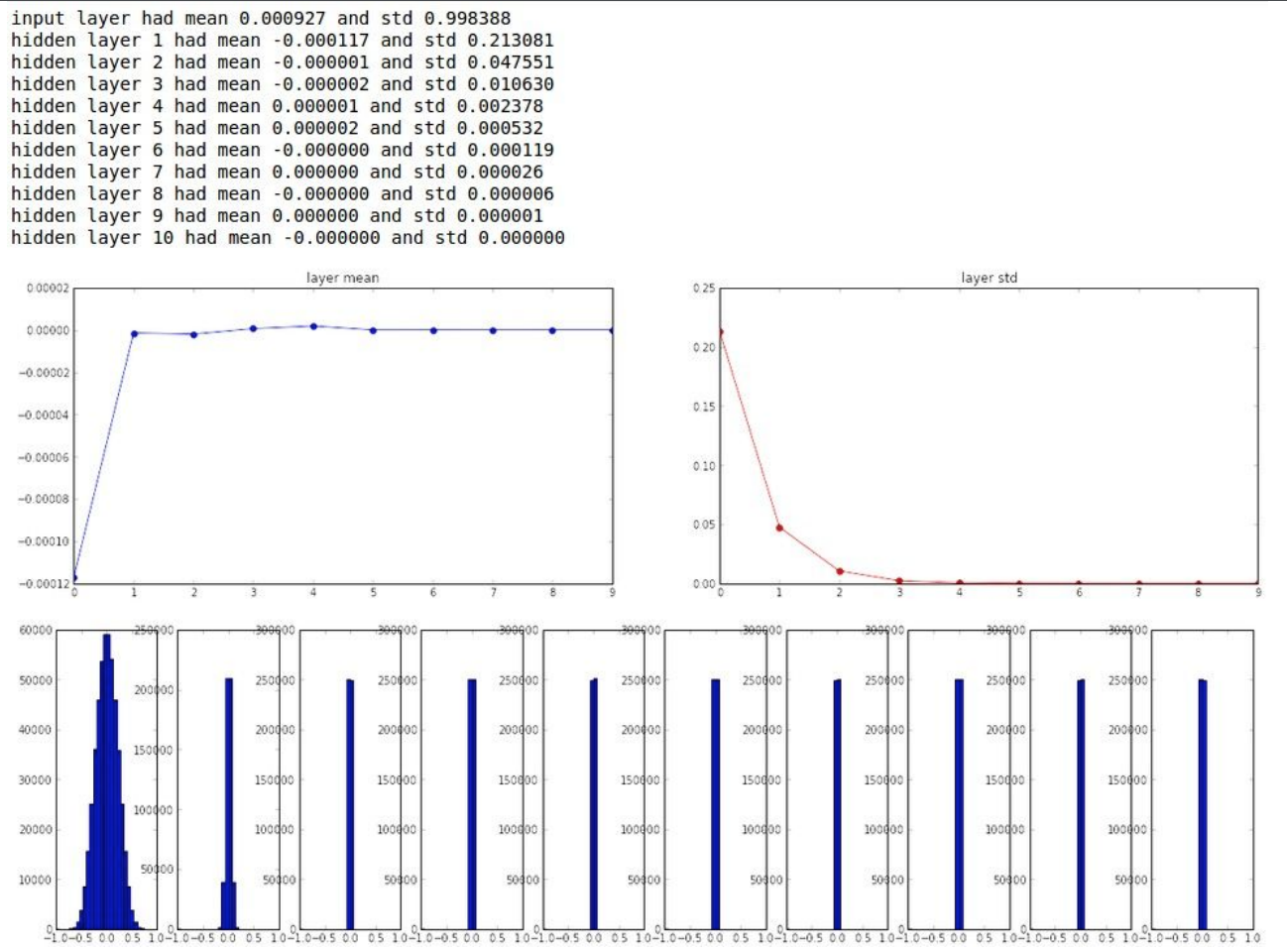
위 그림은activation function으로tanh,hidden layer 10개, 뉴런이 총 500개 인것을Small random number의 방법을 사용하여 실험해본 결과를 각layer마다 분포를 확인한 것이다.그림의 윗 부분을 보면tanh가zero-center이기 때문에 layer를 지날 수록 mean이 0으로 나온다.- 표준편차는 0으로 붕괴된다.
그림의 아랫 부분을 보면첫 layer에는가우시안 분포를 띄지만 점점 무너지는 것을 확인할 수 있게 된다. 왜냐하면각 layer에 작은 숫자를 곱하면($W*x$에서 W가 임의의 작은 수이므로 작은 수를 계속 곱하니까) 모든 값이 빠르게 줄어들고 무너지는 것을 확인할 수 있다.
- 또한 이때
back propagation을 할 때는 입력 값이 매우 작다. $W*X$ gate에서W의local gradient는 X이다. 따라서 X가 작기 때문에 가중치가 매우 작은 기울기를 얻고 업데이트되지 않는다.vanishing gradient현상이 일어난다.
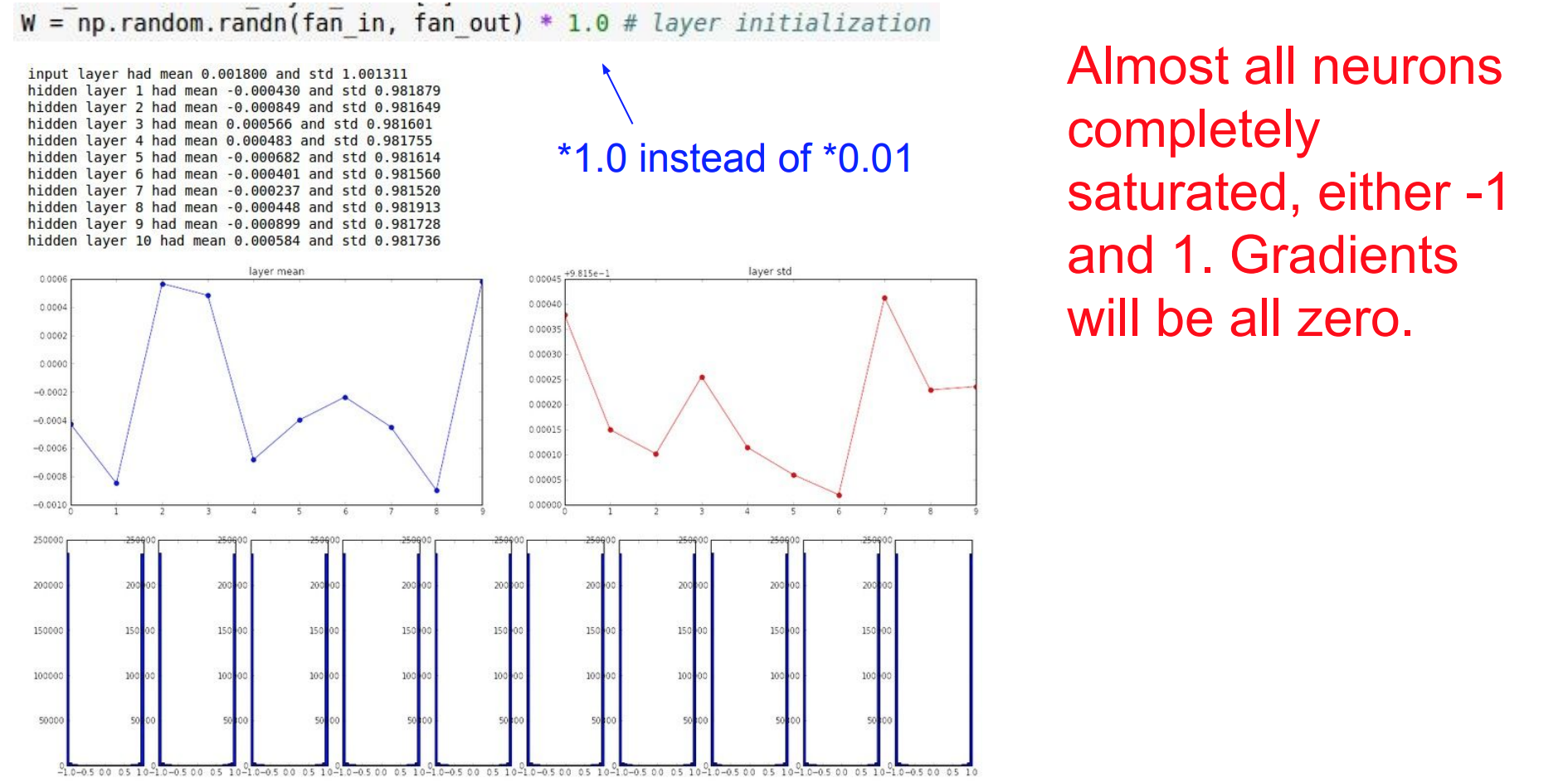
두 번째 방법은W의 값을 반대로 크게 한다면?W = 1 * np.random.randn(fan_in, fan_out) # input, output의 수
- 출력 값들이 1과 -1쪽으로만 가서
explode가 된다.- 따라서
tanh에서 1,-1은 각각 기울기가 0인 지점이다. 따라서 gradient가 0이 되어 update가 되지 않는다.
- 따라서
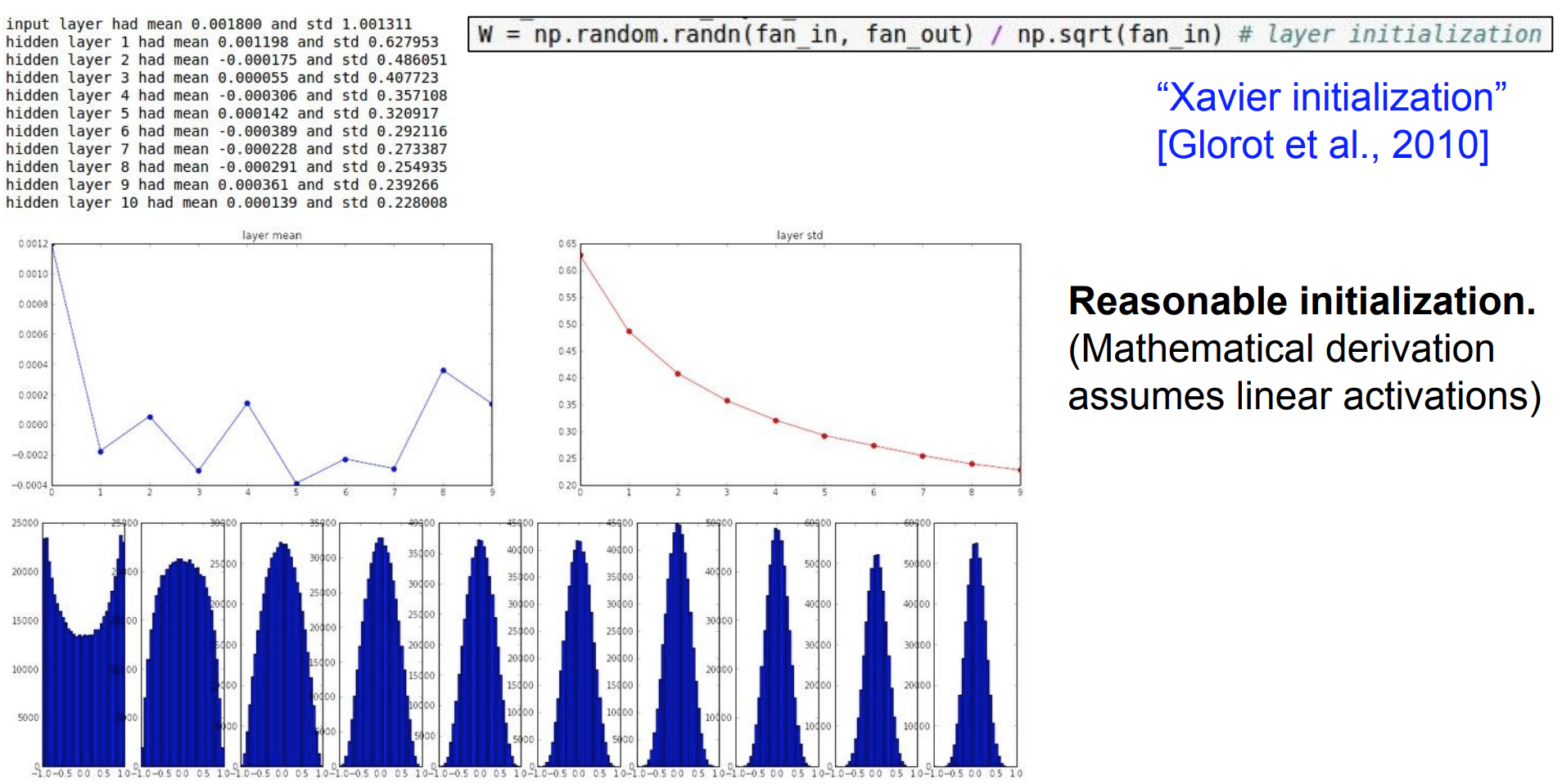
- 앞 선 두 방식 말고
W의 값을 입력의 수를 계산하여입력 수를np.sqrt로 나누어 스케일링을 해주는 방식이 있다. - 이는 작은 숫자면 작은 숫자로 나누고 더 큰 가중치를 얻으면 더 큰 가중치가 필요하다 - 즉, 상대적으로 입력값의 개수에 따라 값을 조절하여 초기화 하기 때문에 합리적인 방식이다.
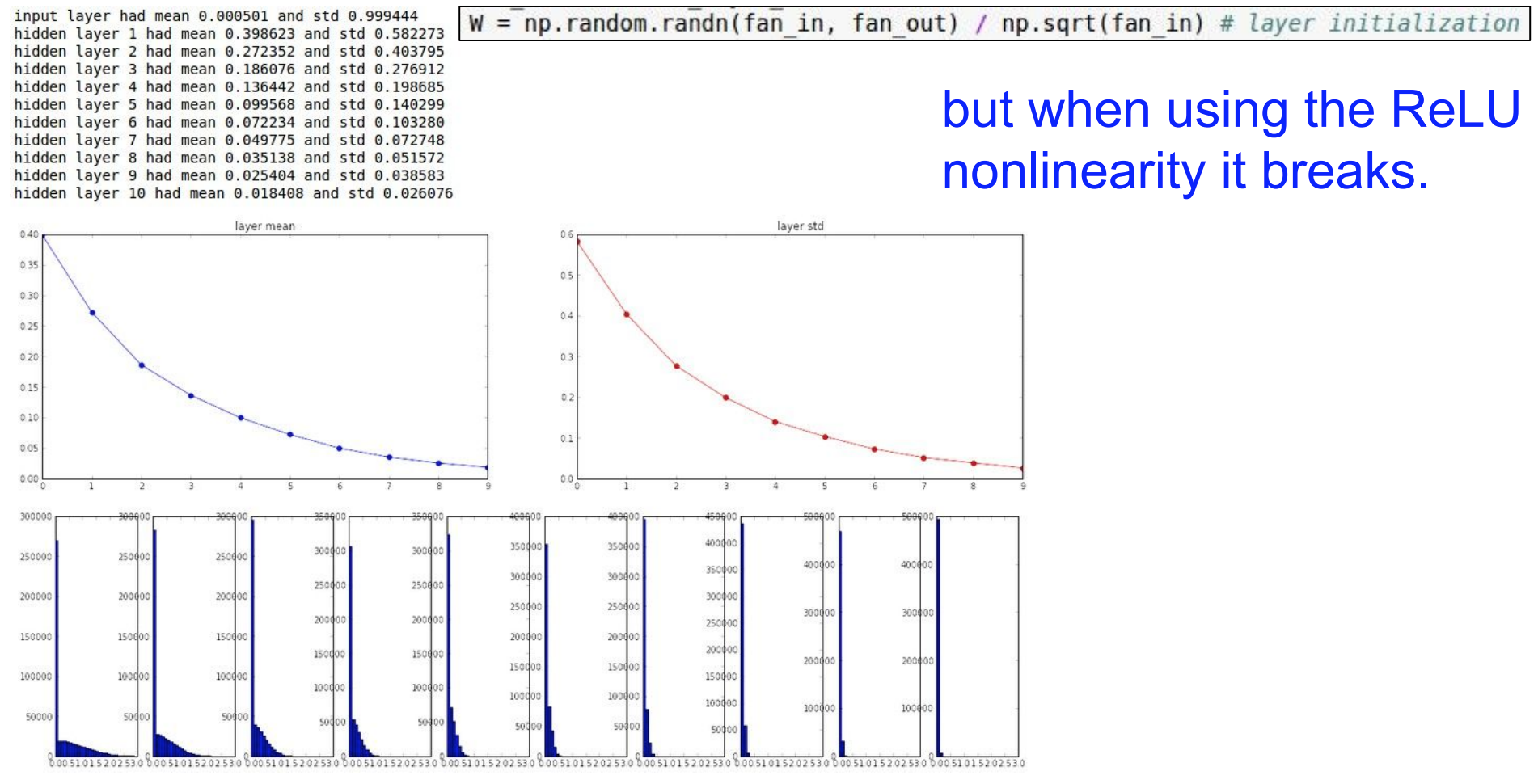
- 이 방식에
tanh말고ReLU를 사용하면 다시 문제가 발생한다. 왜냐하면ReLU를 사용하면 실제로 얻는 분산이 반으로 줄기 때문에 매번 유닛의 약 반을 0으로 설정된다.ReLU의 음수 부분은 전부 0으로 되기 떄문이다.- 따라서
위 그림을 보면 표준편차가 0에 점점 가까워 지는 것을 확인 할 수 있게 된다.
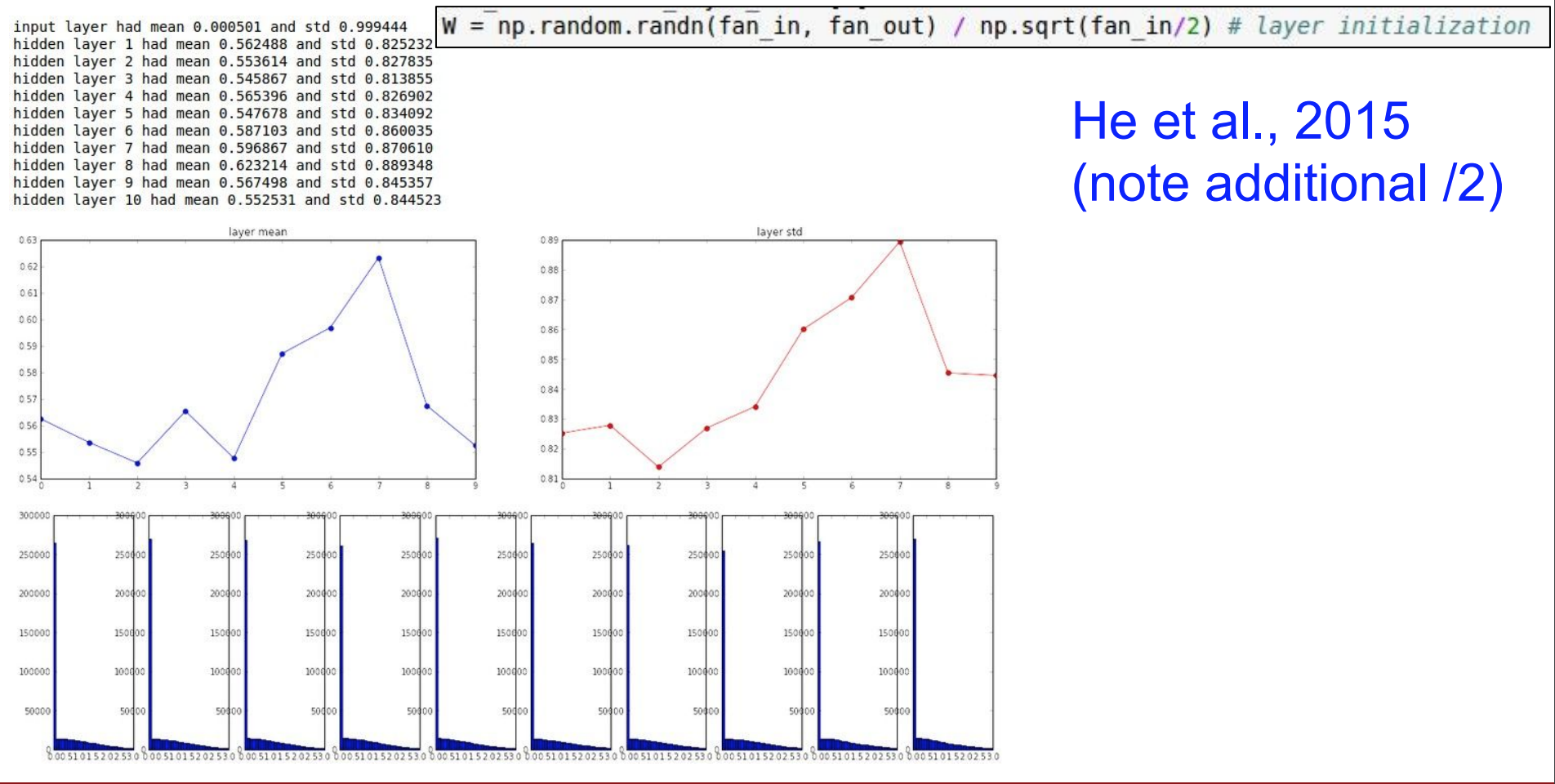
- 이러한 문제를 해결하기 위하여 2로 더 나눈 추가 항목을 사용하여 이를 설명할 수 있다. (카이밍혜 방법)
- 뉴런이 ReLU로 인하여 절반이 죽어버린다는 근거로 2를 더 나눈 것이다.
- 마지막 layer의 그래프를 보면 좀 더 나아지는 것을 확인 할 수 있게 된다.
- 따라서 작은 차이에도 weight의 값들에 대해서 주의를 기울이면, 큰 차이가 난다는 것을 강조합니다.
Batch Normalization
Deep Networks를 지나면W,activation function들에 의해 초기 데이터가 변할 수 있다. 따라서Depp Networks를 지나도 매 층마다 데이터의 분포를 재조절하여 교정하는 방법이Batch Normalization이다.
- 즉, 현재
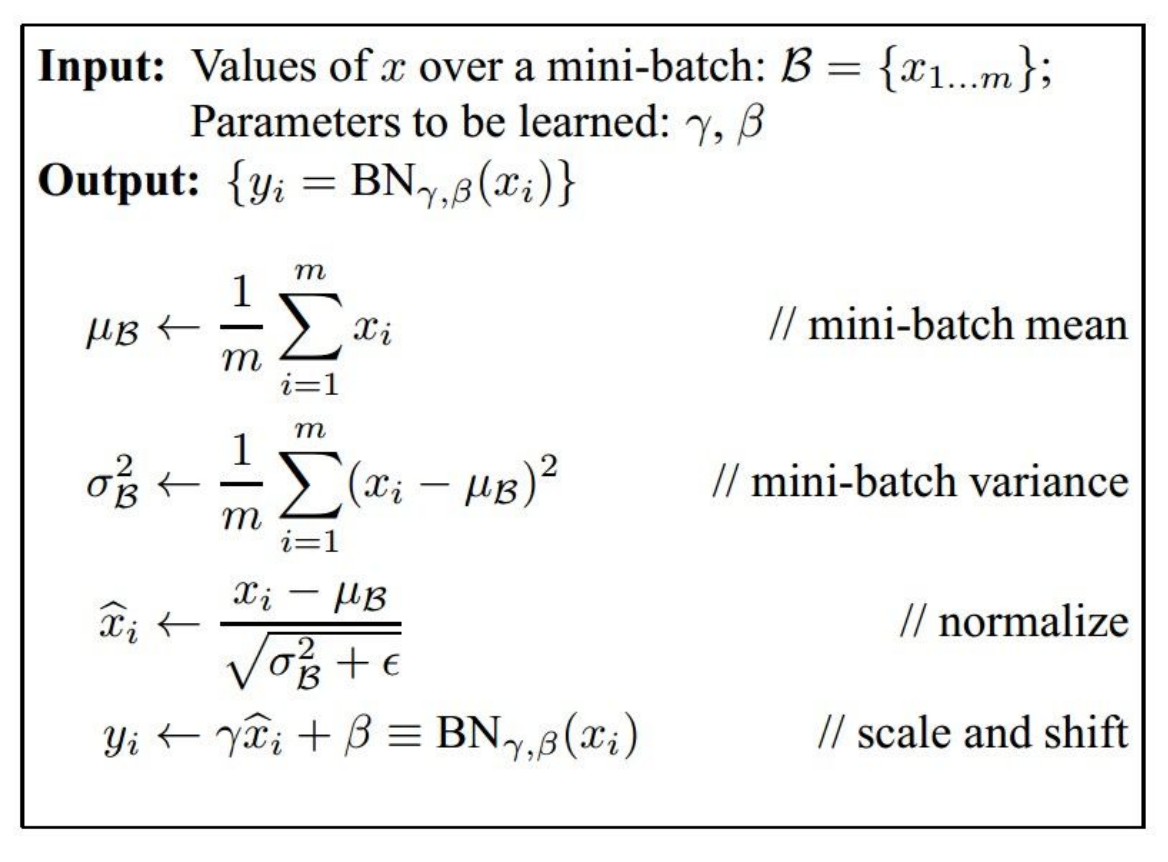
batch에서의평균과 분산을 이용해서 훈련 처음부터batch normalization을 취해주어 모든 층에서정규 분포를따르게 하는 것이다.Batch란 은닉층에 들어온dataset을 말한다.- 이를 사용하면 앞서 배운
W initialization말고Batch Normalization을 두어network의 모든 레이어에서unit 가우스 분포를 가질 수 있는 좋은 위치에 놓도록 할 수 있게 된다.
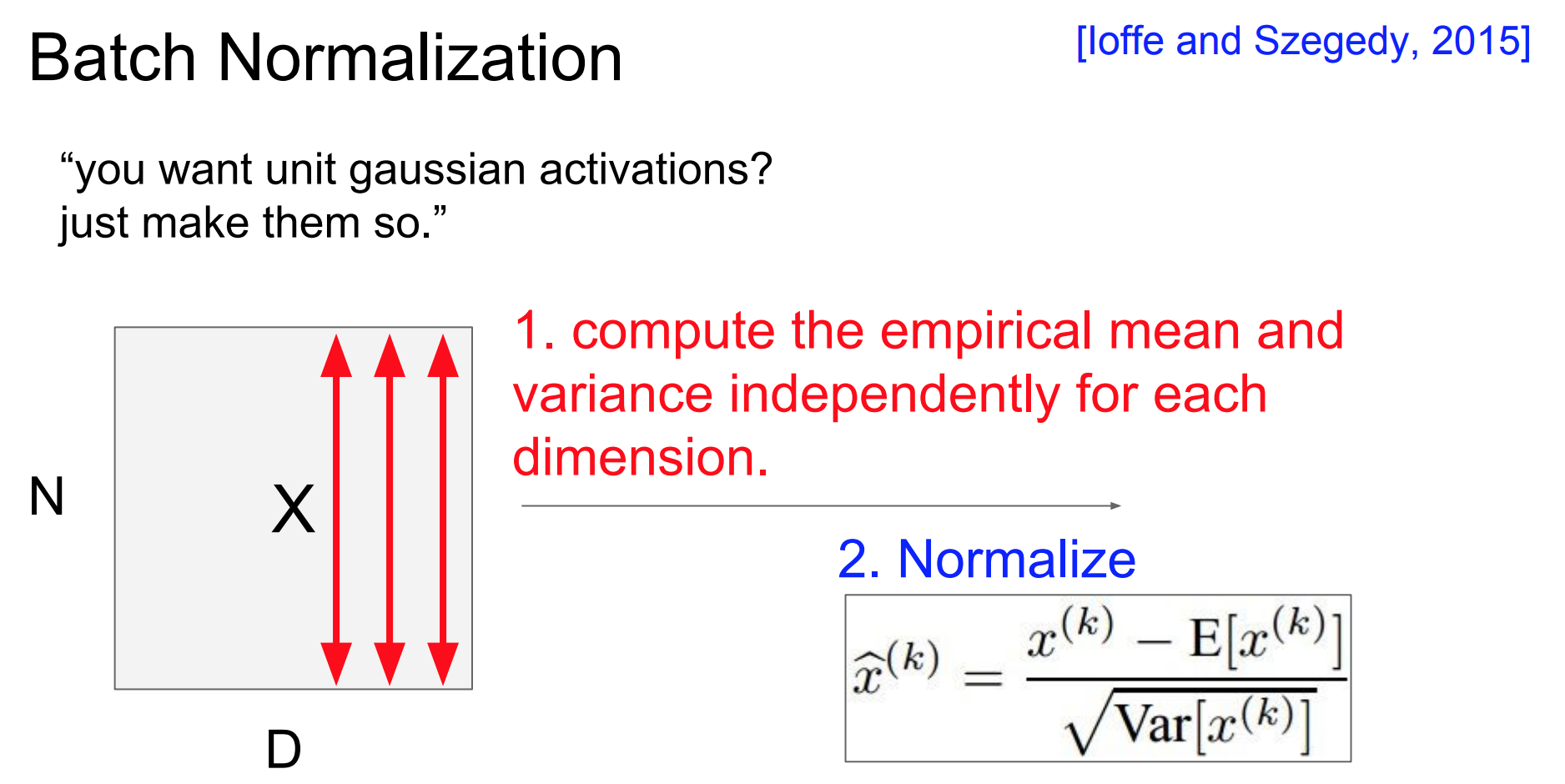
위 그림과 같이 현재의batch에서N개의 D차원input data가 있을 때빨간색 화살표대로 각각의 차원마다(feature element)mean과variance를 계산할 수 있다.- 이것이
한 batch단위에서의normalize이다.
- 이것이
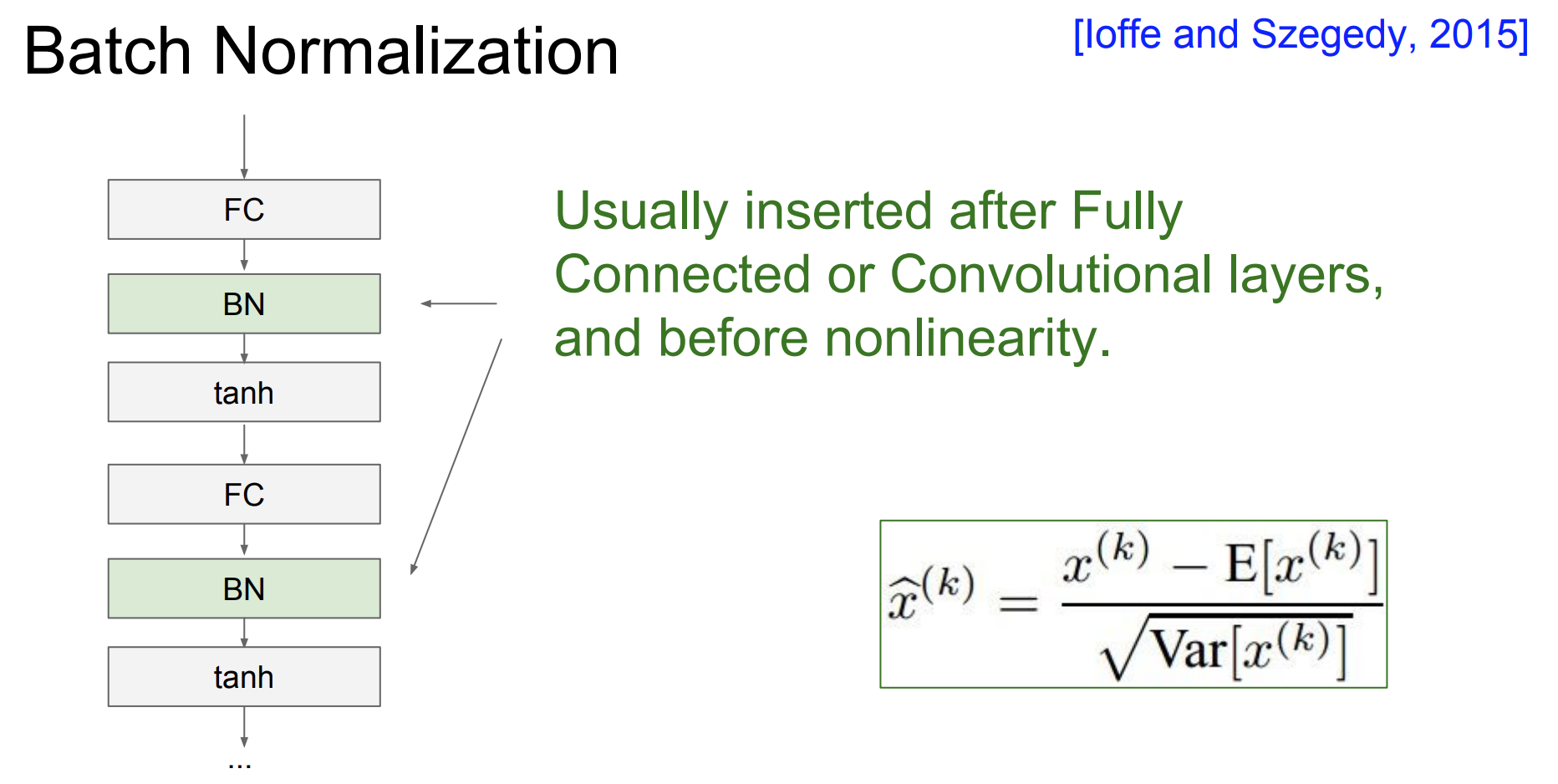
Activation Function을 거치기 전에convolutional과fc층 뒤에BN을 넣어주게 된다.Convolutional층에서는 공간적 정보가 손실이 되면 안되기 때문에activation map당 하나의 평균, 표준편차를 구하여normalize를 수행하게 된다.Batch normalization은tanh (-1~+1)로 가는 입력값들을tanh함수의linear한 부분(기울기가 존재하는 범위)으로 범위를 강제하는 것이다.
- 이렇게
normalize를 한 값을 다시 변환하고 싶을 때위 그림의 scale and shift의 식을 이용하면 된다.감마는표준 편차이기 때문에scaling의효과를 주고,베타는평균 값이기때문에shift의효과를 주는 것입니다.
-
Batch normalization이 structure를 흐릴 수 있다는 생각이 들 수 있는데 데이터를scaling, shfting해주는 것이기 때문에 데이터의 구조는 바뀌지 않습니다.선형변환이기 때문에 공간 구조가 무너지지 않다고 생각하면 이해하기 쉬울 것이다.- 처음부터
그래프의 개형이변하지 않는다.
- 처음부터
-
Data leakage의 이유 때문에test dataset에서batch norm을 할때에는train dataset에서 이용한 mean과 variance를 이용한다.
Babysitting the Learning Process
- 모델의 전체적인 학습 과정을 어떻게 바라봐야하는지, 등의 전체적인 프레임을 살펴본다.
첫 번째로preprocessing data이다. 보통 image 데이터는zero-mean을 사용한다.
두 번째로choose the architecture이다. 그 다음으로network를 초기화 하는 것이다.- 이를 통해
forward pass를하고loss가합리적인지 확인하고 싶다. - 또한
정규화를추가를 했을 때loss가 증가하는지도확인해야한다.
- 이를 통해
- 그리고 학습을 시키는데,
sanity check으로 확인하여매우 작은 데이터가완벽하게 과적합 하는지 확인을 한다.
- 이제 전체 데이터를 학습 시키고,
Loss를확인하면서Learning Rate를조정한다.
- 또한
loss는그대로인데accuracy가증가한 이유가 무엇일까?- 확률이 여전히 꽤 분산되어 있기 때문이다.
- 이 확률들을 올바른 방향으로 약간 이동하게 하면 loss는 그대로지만 정확도가 크게 높아질 것이다.
Hyperparameter optimization
- 적절한
hyperparameter를 찾는 방법으로cross-validation를 설명한다. 그것의 방법은 아래와 같다.Frist stage: only a few epochs to get rough idea (좋은지 안좋은지 빠르게 알 수 있게 된다.)Second stage: 더 오래 길게 수행한다.- 감지하기 위한 팁이 있다면
loss가기존과 3배가 증가하면 종료
-
다음 방법으로는
Grid search,Random search방법이다. -
Grid Search는 주어진 범위를 랜덤이 아닌 등간격으로 탐색한다는 점에서random search와 차이점이 있다.- 이 경우
특정부분의 특징을 가진parameter가 무시되기 때문에random search방법이 선호된다.
- 이 경우
Random search의 방법은58번의방법과 같이 랜덤하게 사용하면 된다.

- 다음은
loss를해석하는 방법에 대한 설명이 나온다. 위 그림을 보면lr값은update의속도와 방향의 정확도를 전부 가지고 있는 빨간색 그래프가 제일 좋다.
- 다음 그림은 lr의 값을 너무 작게 선정 했을 때 발생할 수 있는 문제를 나타낸다. lr의 값을 제대로 설정하지 못하여 gradient의 업데이트가 제대로 일어나지 않아서 최적의 방향을 찾는 시간이 너무 오래 걸린 것이다.
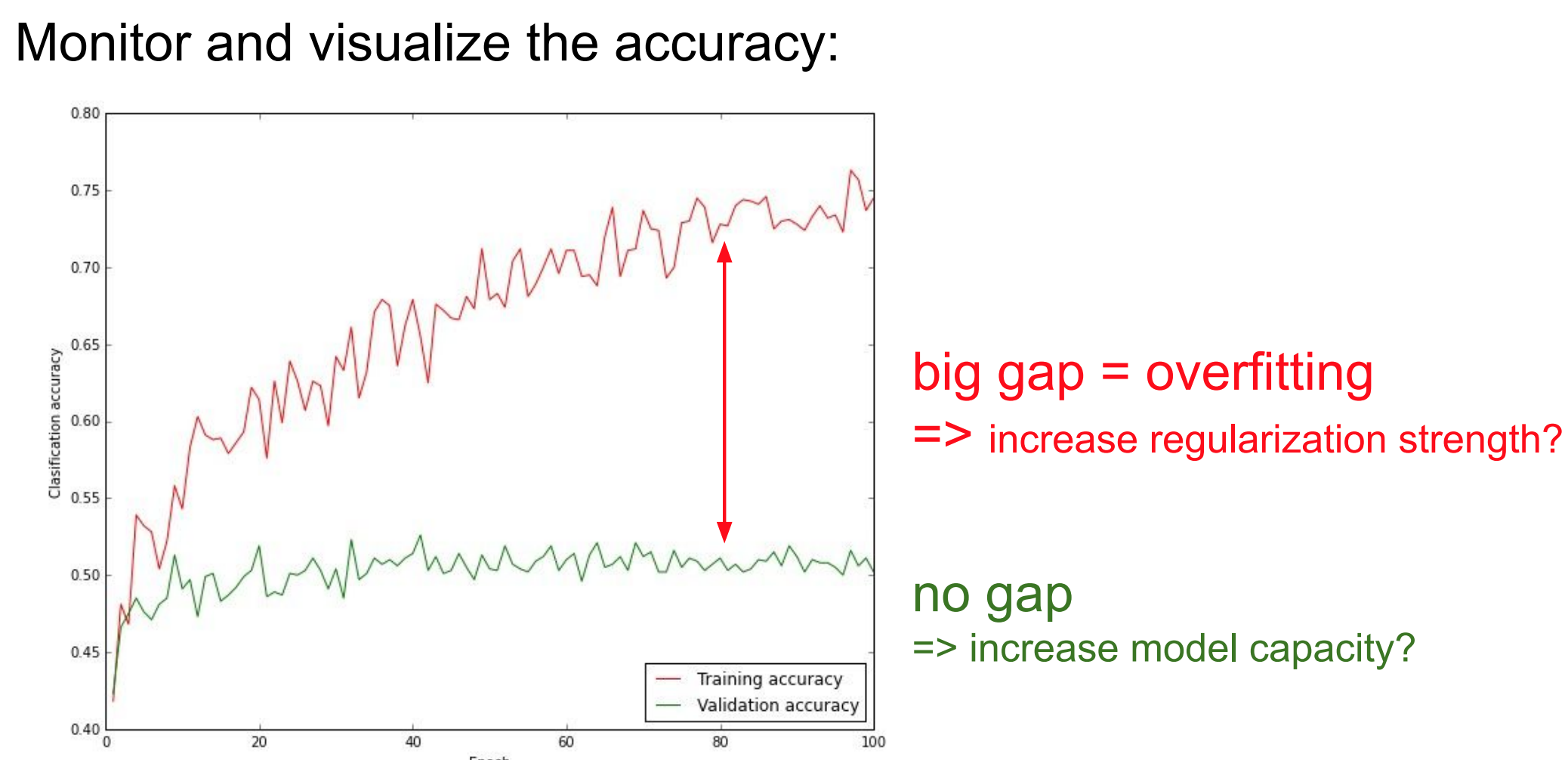
- 또한 위 그림은
validaiton의 acc값과training의 acc값의 차이가 크면 안된 다는 사실을 알려준다. 왜냐하면 train에 과적합이 되었다는 사실이기 때문이다.- 따라서 과적합을 줄여주기 위한 방법으로
규제화,데이터 셋 더 확보등을 생각할 수 있을 것 같다.
- 따라서 과적합을 줄여주기 위한 방법으로