[CS231n] 05.Convolutional Neural Networks
Contents
개요
CS231n의 5강에 대한 내용을 정리 할 것이다.
- 저번 강에서는
W를 업데이트 하는 과정Chain-Rule과 간단한Neural Networks에 대해서 배웠는데 이번 강에서는Convolutional Neural Networks에 대해서 배울 것이다.
A bit of history
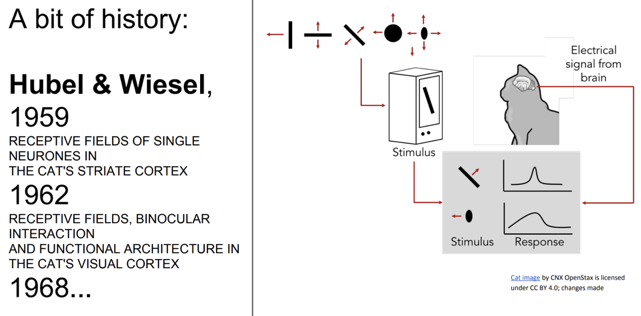
위 그림을 보면Hubel & Wiesel이 고양이 실험을 했는데 이때 시각 피질 안의 뉴런이local receptive field를 가지게 된다는 것을 알게 되었다.
- 또한 이렇게 겹쳐지는 receptive field들이 전체 시야를 이루게 된다는 사실을 알게 되었다.
- 어떤 뉴런은
low level, 또 어떤 뉴런은high level의 특징들을 포착하는 것의 조합으로 이루게 된다.
- 이러한 지식을 기반으로
image처리를 위해 98년에Lenet, 2012년에AlexNet이 등장하게 되었다.
Convolutional Neural Networks
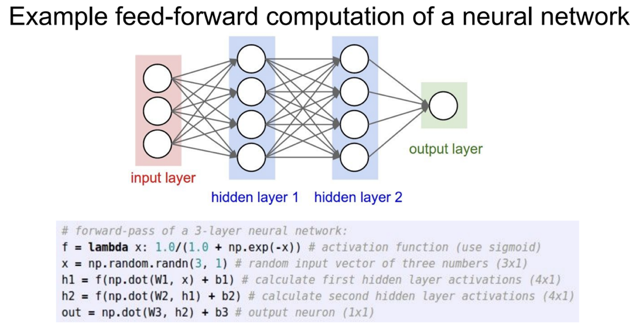
- 저번 시간에
node들이 linear하게 모두 연결되어 있는 층을Fully Connected (FC)층이라고 한다.
- 또 이
FC층이 행렬의내적 계산을 통한 아주 효율적인 계산을 할 수 있다고 배웠다.
- 따라서
위 그림을 보면 하나의 layer는 하나의 연산을 통해 계산을 하여 편의성을 더해주는 사실을 볼 수 있다.
- 하지만 이미지 처리를 할 땐 위의 FC층이 좋지 않다. 왜냐하면 이미지의
spatial(공간적)정보가 손실이 되기 때문이다.
- 이러한 문제점을 해결하기 위하여
Convolutional Neural Networks (CNN)이 등장하게 되었다.
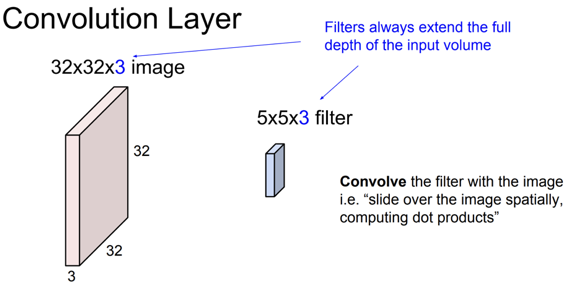
- CNN에 대해 더 자세히 알아보면
위 그림과 같은 이미지가 있고 필터가 존재한다. 이 필터는 우리가 linear classification에서 배웠던W의 역할을 한다.
-
이런 필터는 input image위를 아래와 같이
슬라이딩하면서 요소별 곱을 하고 그것을 또 하나의 합으로 나타낸다.
위 그림에선 3 * 3의 크기의 filter가 5 * 5의 크기의 image 위를 슬라이딩 하고 있다.
- 이 filter에
중요한 사실이 있다. 바로 filter의 depth 크기는 input volume의 depth랑 항상 같다는 점이다.
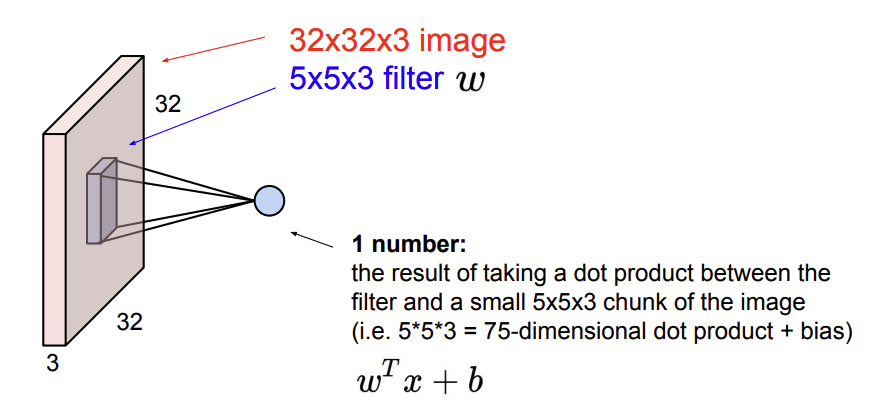
- 왜냐하면 우리가 시각적으로 보기에 image위를 슬라이딩 하는 것 처럼 보이지만 실제로의 연산은 $w^Tx$에서 image에서 filter가 겹쳐지는 부분만큼 가져온 후 1차원으로 늘린 연산이다.
- 따라서
위 그림과 같이 5*5*3의 크기인 filter연산은 곧 75-1D의 내적 연산(1차원)을 수행하는 것으로 이해하면 될 것 같다.
- 이렇게 연산을 수행하기 때문에 input volume의 depth랑 filter depth랑 같아야 filter의 내적 연산을 수행할 수 있게 된다.
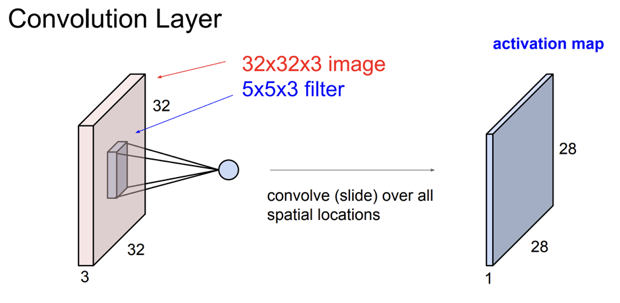
- 이렇게 filter가 슬라이딩을 하여 연산을 한 번 모두 하면
위 그림과 같이 하나의activation map이 나온다.
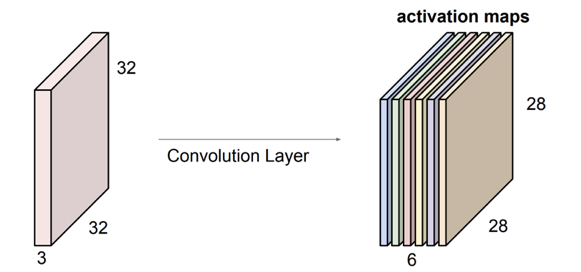
- 만약 필터가 6개가 있다면 앞서 말한 내적 연산을 6번 수행하여 ouput의 depth가 6인
activation map이 나오게 된다.
- 각 필터는 input volume에서 특정 유형의 템플릿이나 개념을 찾는다.
- 6개의 각각 다른 가중치를 지닌
activation map으로 생각하면 된다.
- 이런 layer들을 연속적으로 쌓아나가면 그것이
convolution network가 된다.
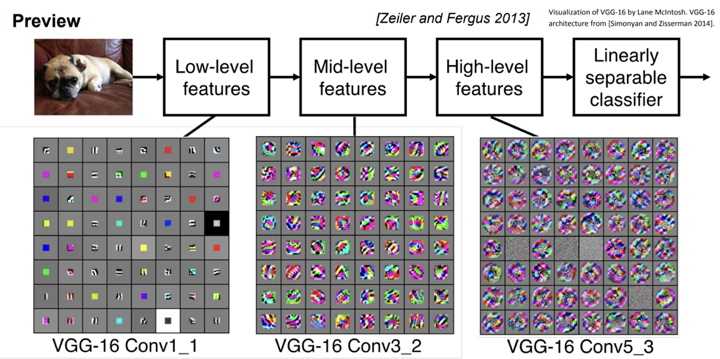
- 이런 convolution network에서는 처음에
low-level(edge 등등)의 특징을 추출하고 점점 깊어지면high-level의 복잡하고 추상적인 개념들이 나타나게 된다.
- 이 정보들을 FC층에 넣고 각 class 수의 확률 연산을 하게되면 분류가 이루어진다.
- 왜
FC층이필요하며, 어떻게 분류가 이루어지는지 의문을 가졌다. high-level features는 넓은reception field를 가지고 있다. (점점 깊어질 수록 이미지의resolution이줄어들기 때문)- 이러한 복잡하고 풍부한 정보를 포함하고 있는 feature들을 linear하게 놓고 모든 정보를 연결(Fully connected)을 하여 각각의 class별 weight를 계산을 하게 되면 해당 이미지가 class별 확률(softmax)이 나오게 될 것이다.
- 따라서 CNN으로 feature를 추출하고
FC 층에서 분류하는 이유는 이러한 과정을 통해 각 클래스별 확률을 효과적으로 계산할 수 있기 때문입니다.
- 이러한 방법들은 앞서
history에서 말한 인간의 인식 능력에서의 시각피질과 유사한 특징을 보이는 것을 알 수 있다.
- 픽셀은 항상 일관된 순서를 가지며, 서로 인접한 픽셀끼리 영향을 준다.
- 만약 모든 근처의 픽셀이
빨간색이라면해당 픽셀도빨간색일 가능성이 높다. 이렇게 픽셀은주변 픽셀 값과 비교하여 정보를 추측할 수 있습니다. 이런 특성을locality라고 합니다.
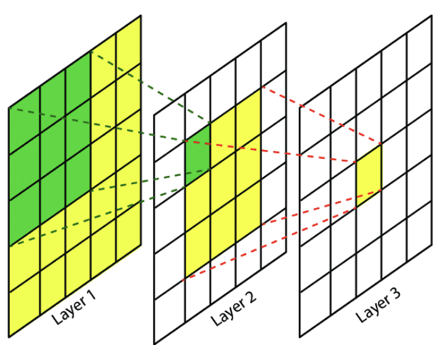
- 따라서
위 그림과 같이sub sampling과정을 통해 image의 resolution을 줄이고 local feature들에 대한 연산을 통해global feature(high-level)로 나아가weight 변수를 줄이고변화에 무관한invariance를 얻게 되는 것이다.
Convolution의 표준 정의는 다음과 같다. $$f[x, y] * g[x, y] = \sum_{n_1 = -\infty}^{\infty} \sum_{n_2 = -\infty}^{\infty} f[n_1, n_2] \cdot g[x - n_1, y - n_2]$$
- 이제까지 대략적인
Convolution이 작동하는 방법에 대해 알아보았고 다음은filter의Stride에 관한 내용이다.
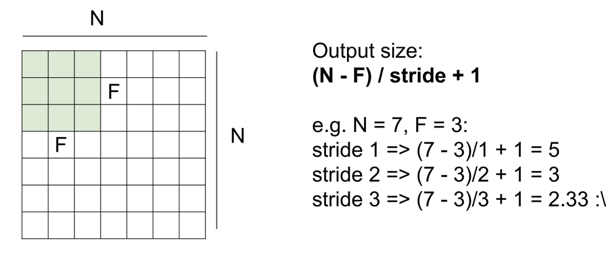
Stride는 filter의 보폭, filter가 슬라이딩을 할 때 얼만큼 움직일지를 결정하는 것이다.
filter가 한 번의 연산을 거친 후output size는 다음과같은 식으로 구한다.
- 하지만 이것만 활용하면 filter가 가장자리의 정보를 많이 얻기 쉽지 않다. 그래서 나온 개념이
padding이다.
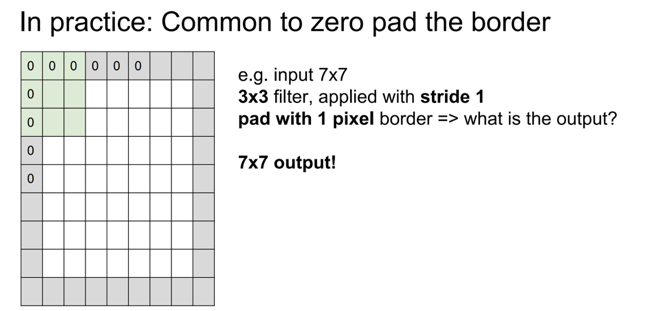
Padding은 input에 0을 더하여 가장자리의 정보도 얻을 수 있게 한다.
- 또한
Padding은 network가 깊어질 때 image의resolution를동일하게 유지시키려고도 많이 사용하게 된다.
- 따라서 Padding까지 고려한 output size는 다음과 같다. $$ (\frac{W+2P-F}{S}, \frac{H+2P-F}{S})$$
-
다음은
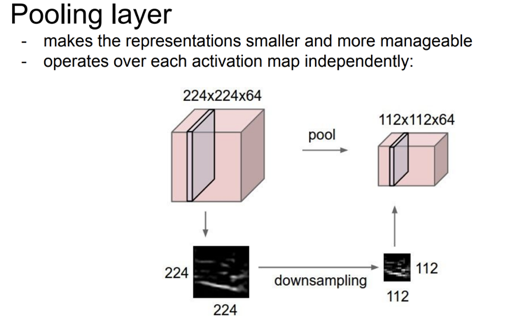
pooling에 관한 설명이다.Pooling은 이미지의resolution을 줄이는 역할을 하게된다. 여기서 중요한 점은 오로지 resolution($(W,H)$)의 변화만 있지depth에 변화는 없다.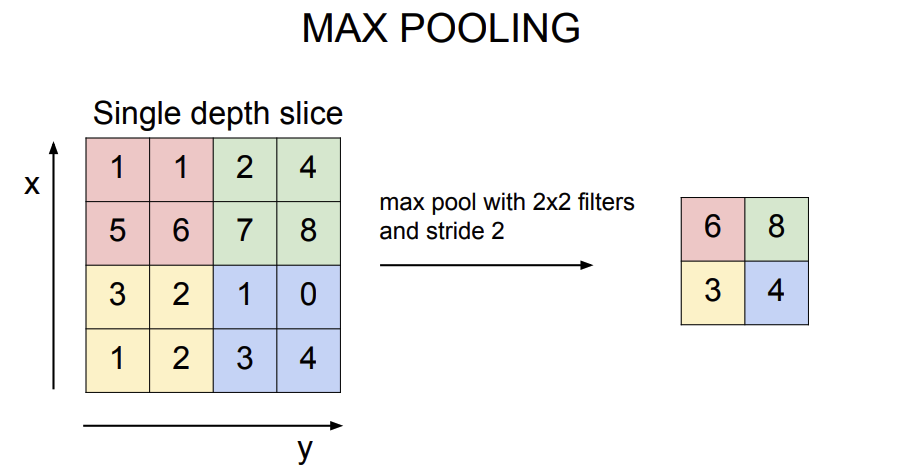
- pooling에 방법에는 크게 두가지가 있는데
average pooling과max pooling이 있다. max pooling의 연산은위 그림과 같고 주로max pooling을 사용한다.
- pooling에 방법에는 크게 두가지가 있는데